TOP


Anchor-Less UWB indoor positioning system
In recent years, the increasing prevalence of IoT devices and mobile robots has driven growing demand for indoor positioning technologies.
Among the various approaches under consideration, positioning using Ultra-Wideband (UWB) has gained attention for its high positioning accuracy and low power consumption.
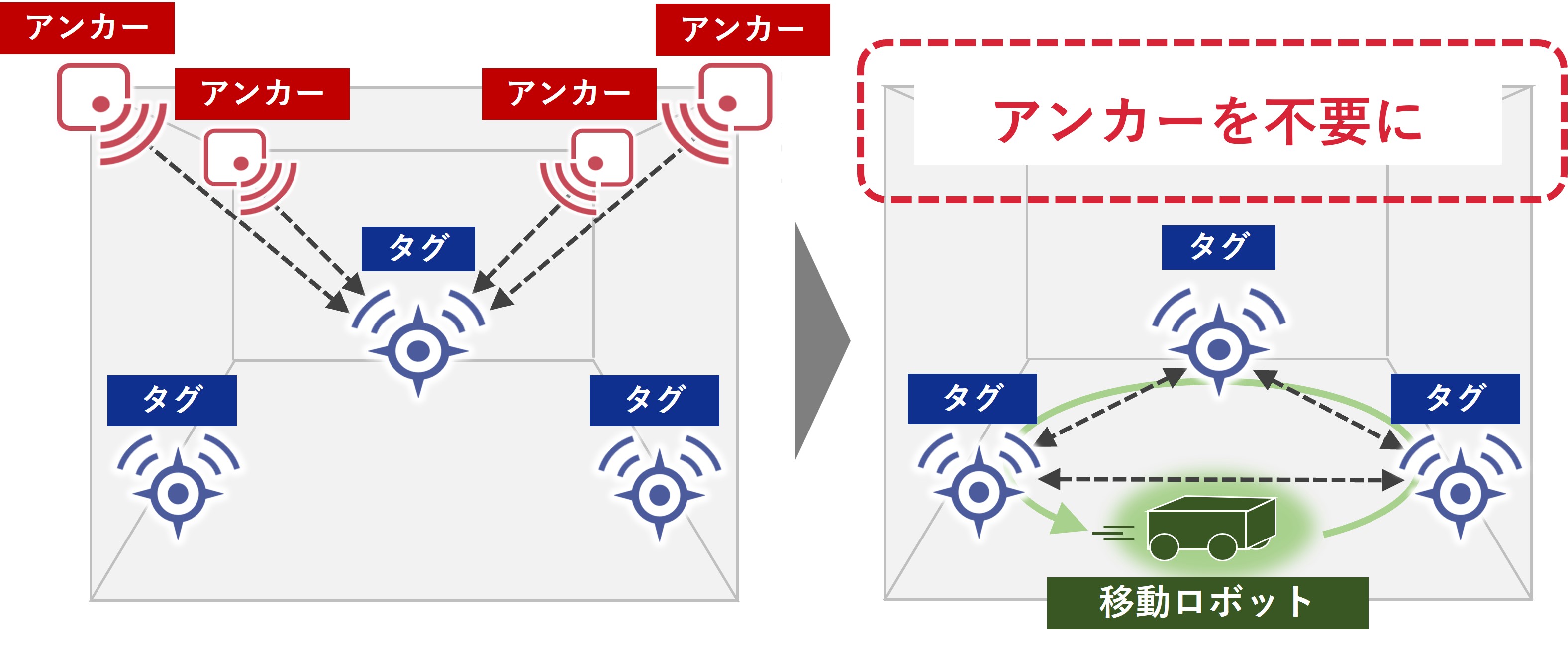
Conventional UWB positioning systems typically involve measuring the distances between multiple "anchors" with known absolute positions fixed in the environment and "tags" attached to mobile objects, then estimating the tags' positions using triangulation.
However, setting up such anchors presents several challenges, including the cost of installing many anchors, the labor-intensive process of manually measuring anchor positions, and the aesthetic impact of anchors and wiring.
To address these issues, this study proposes a novel positioning system that eliminates the need for fixed anchors, thereby overcoming these challenges.
In this study, instead of relying on anchors with known absolute positions, we use a "mobile robot equipped with a tag (capable of determining its own absolute position)" and "tags with estimated positions."
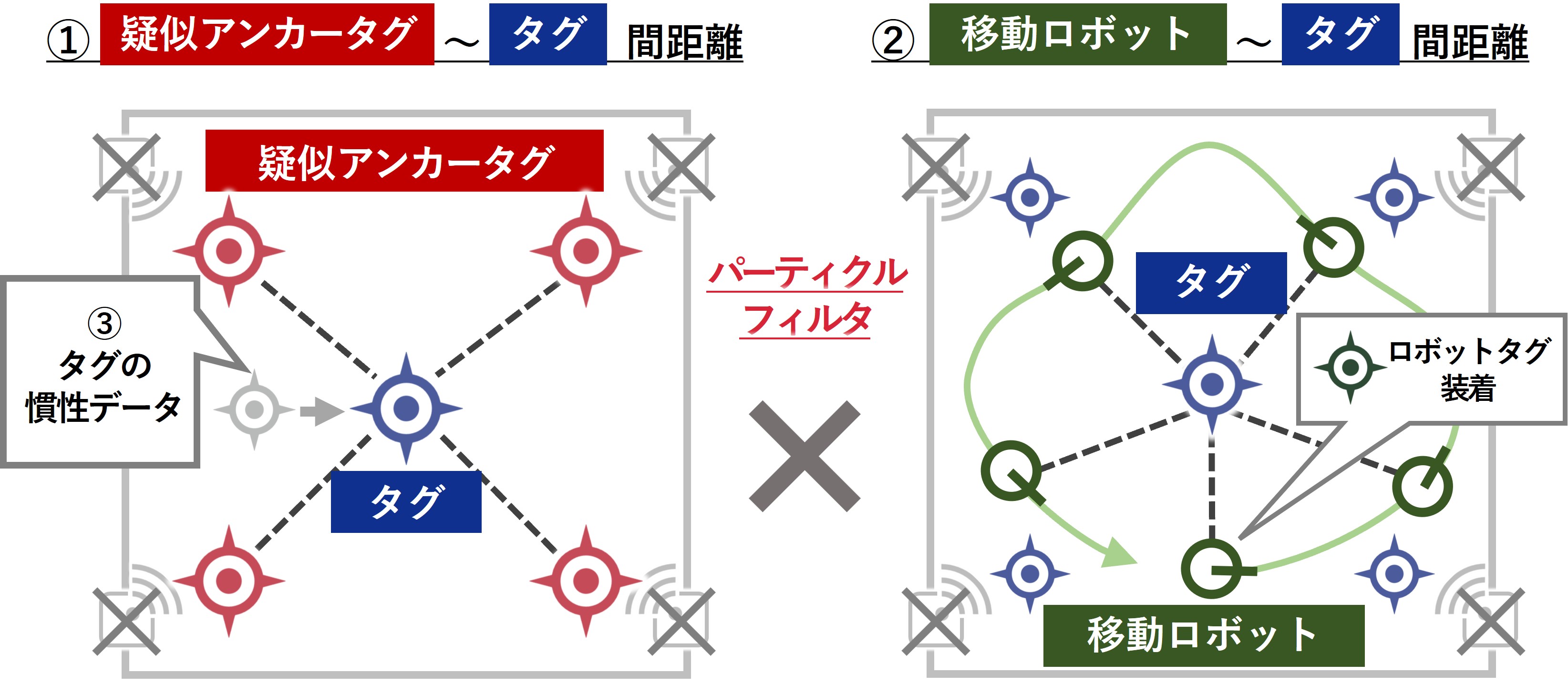
As the mobile robot moves through space, it utilizes the absolute position of its onboard tag and distance information from it to narrow down the position of the target tags.
Additionally, once the position of a tag has been estimated, it can be treated as an anchor substitute (referred to as a pseudo-anchor tag). By leveraging the distance information between this pseudo-anchor tag and other tags, the positions of additional tags can be further refined.
By executing these two methods in parallel, the proposed system enables faster and more accurate position estimation.
This method is useful in scenarios where the positions of multiple objects need to be identified in the presence of a mobile robot.
Specific applications include AGV-based transport in warehouses, delivery and cleaning robots in facilities, as well as smart furniture and WPT-Robots.
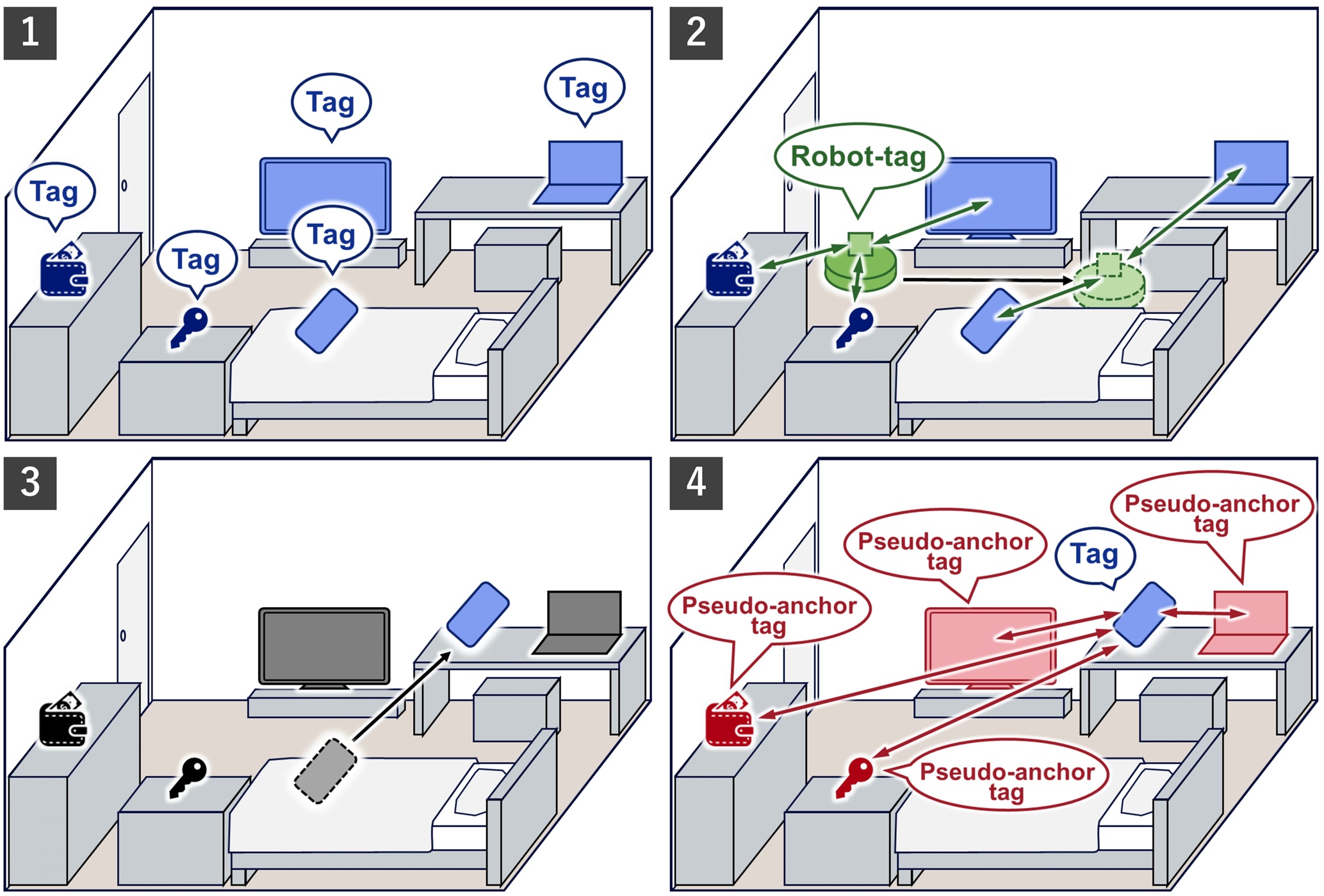
Here, we present the procedure using a scenario in which the positions of multiple objects in a living space are identified.
First, a tag is attached to the target object (Step 1). Next, a mobile robot with known self-position measures the distance to the tag and estimates its position (Step 2).
If the target object moves (Step 3), a stationary tag with a known position is utilized as a pseudo-anchor tag to perform distance measurement and position estimation (Step 4).
In this way, the tags function as anchors, eliminating the need for fixed anchors.
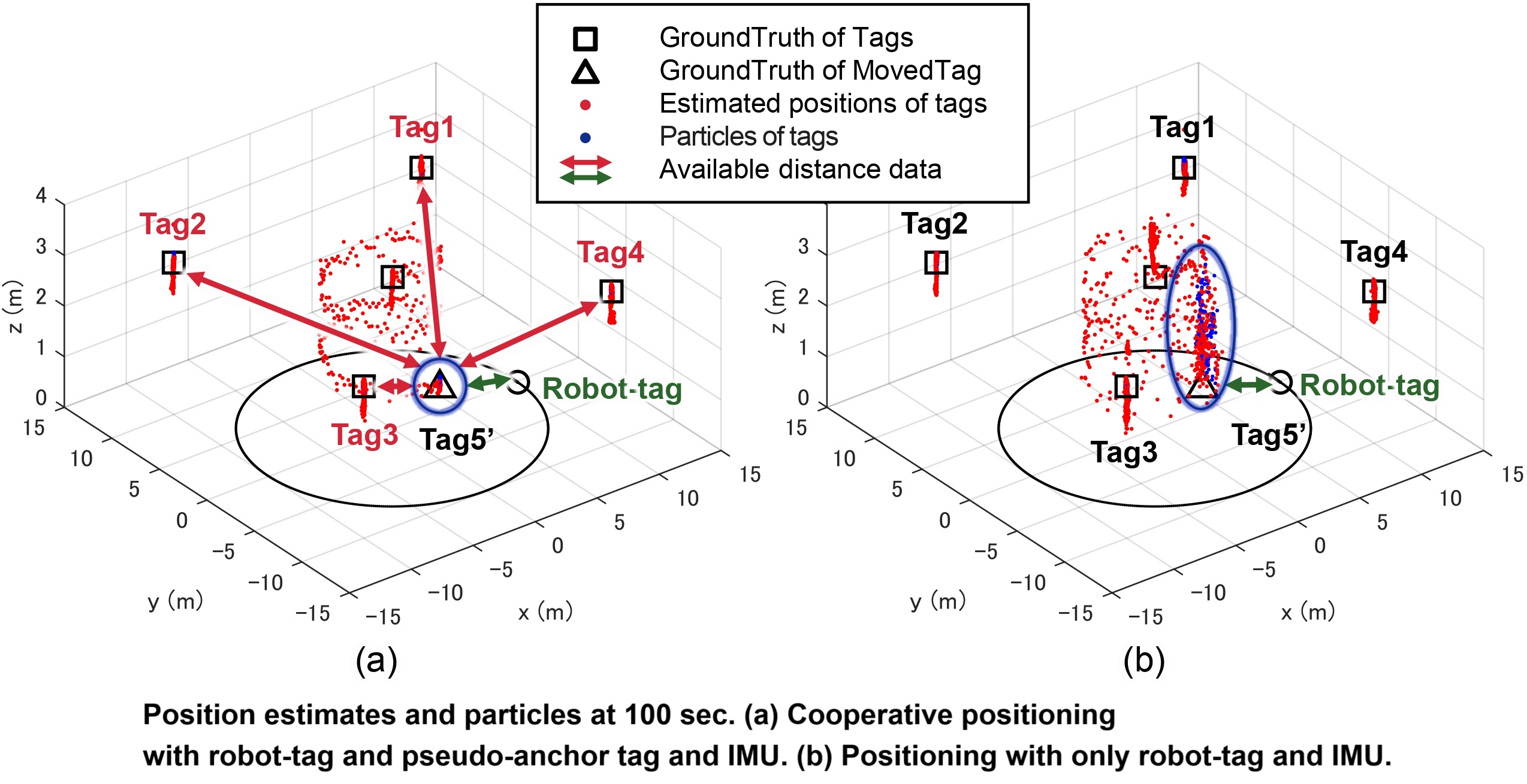
To evaluate the effectiveness of the proposed method, simulations were conducted in MATLAB to compare the positioning accuracy with and without pseudo-anchor tags.
The results showed that even without fixed anchors, an accuracy of less than 10 cm was achieved, demonstrating positioning performance equivalent to conventional methods.
This indicates that pseudo-anchor tags can serve as substitutes for fixed anchors, increasing the amount of information available for weight calculation, thereby accelerating position estimation and reducing position error.
Researcher

M1
Taisuke Sato

B4
Tomoki Takadera