TOP

Estimation of Localizability of confidence in Localization for autonomous mobile robots
The reliability of localization is an important factor in autonomous mobile robots.
An autonomous mobile robot navigates while estimating its own position on a map.
Therefore, if the robot fails to estimate own pose, it may be unable to reach its goal or risk causing accidents.
Therefore, the objective of this research is to estimate the reliability of localization (Localizability) at each location on the map for safe navigation.
Our study focuses on localization using laser sensors.
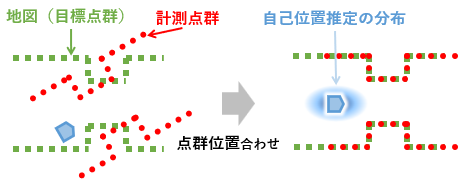
In localization using laser sensors, the scan point cloud obtained from the sensor is aligned with maps or others.
In this process, accurate alignment is possible if the scan point cloud has distinctive features.
Conversely, in places with no features, accurate alignment may not be possible, leading to failure in localization.
Especially in corridors with only parallel walls, the obtained scans are linear, which leads to the problem that the scan point cloud can be aligned to any position along the direction of the corridor.
As a result, the robot's position cannot be uniquely estimated.
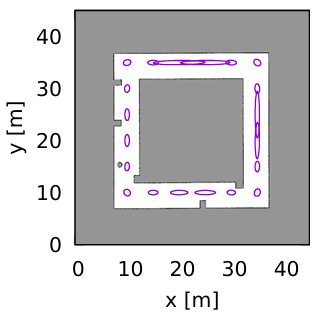
The following figure shows the distribution of the reliability in the localization, as estimated through experiments.
The ellipse represents the reliability of localization at that position, with smaller ellipses indicating more accurate localization.
The corridors on the left and bottom have features such as pillars, which provide distinctive environmental shapes.
Conversely, in the corridors on the top and right, the ellipses are stretched along the direction of the corridor.
This indicates that localization errors are more likely to occur in that direction.
Considering the reliability of localization in path planning, we can expect safe navigation of the robot.
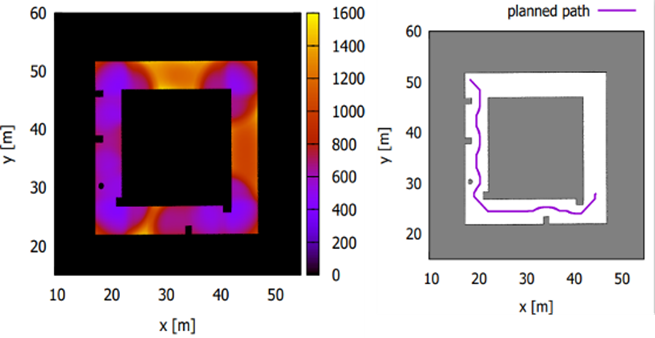
The figure on the left is a color map showing the scalar value of the reliability of localization (Localizability) at each location.
The lower the value, the more accurate the localization.
By using localizability as a cost in path planning, a path can be planned through places where accurate localization is possible.
The results of the experiment confirmed that paths considering localizability have smaller localization errors compared to those that do not consider localizability.
Researcher

B4
Yuto Tsubouchi