TOP


Full dive VR interface without actual body motion
In current virtual reality (VR) systems that use motion capture,
the movements of the virtual body are limited to those that can be performed by the real body.
For example, when manipulating a virtual body that differs in scale from the real body,
some movements may interfere with the real body.
Additionally, movements beyond the joint range of motion cannot be performed in the virtual space.
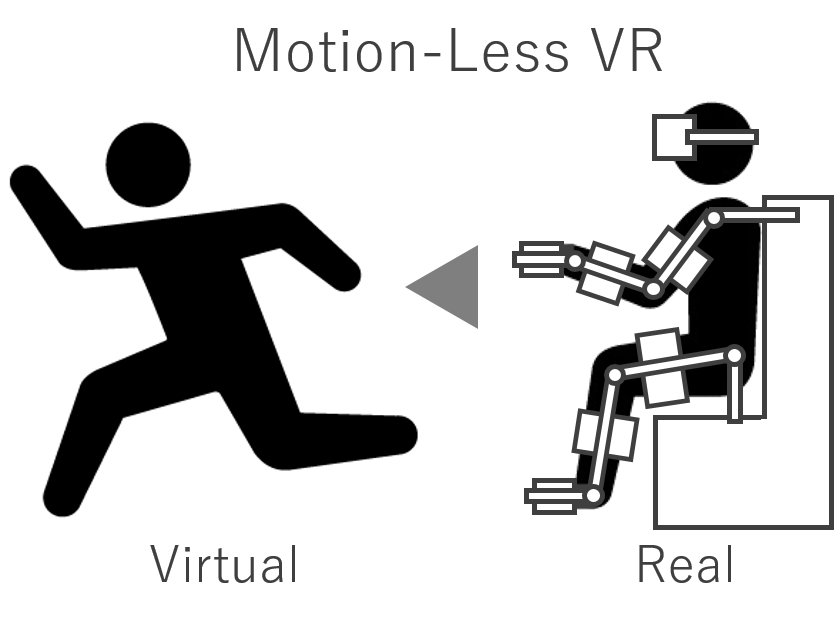
Therefore, we have proposed the concept of "Motion-Less VR," an immersive VR interface that does not require movement of the real body.
We are currently working on various research projects within this framework with the aim of expanding the possibilities of embodiment.
Motion-Less VR is realized by acquiring motion intentions and presenting sensory information according to those intentions under motion suppression of the actual body.
In the figure on the right, Motion-Less VR is applied to the index finger. The system uses a sensor to acquire the force generated when the user tries to move the finger,
interprets the motion intention in a mechanics-based manner, and presents the visual information using an HMD (Head Mounted Display). Evaluation experiments of the system have confirmed that the operability of the system is similar to that of commercially available hand-tracking devices.
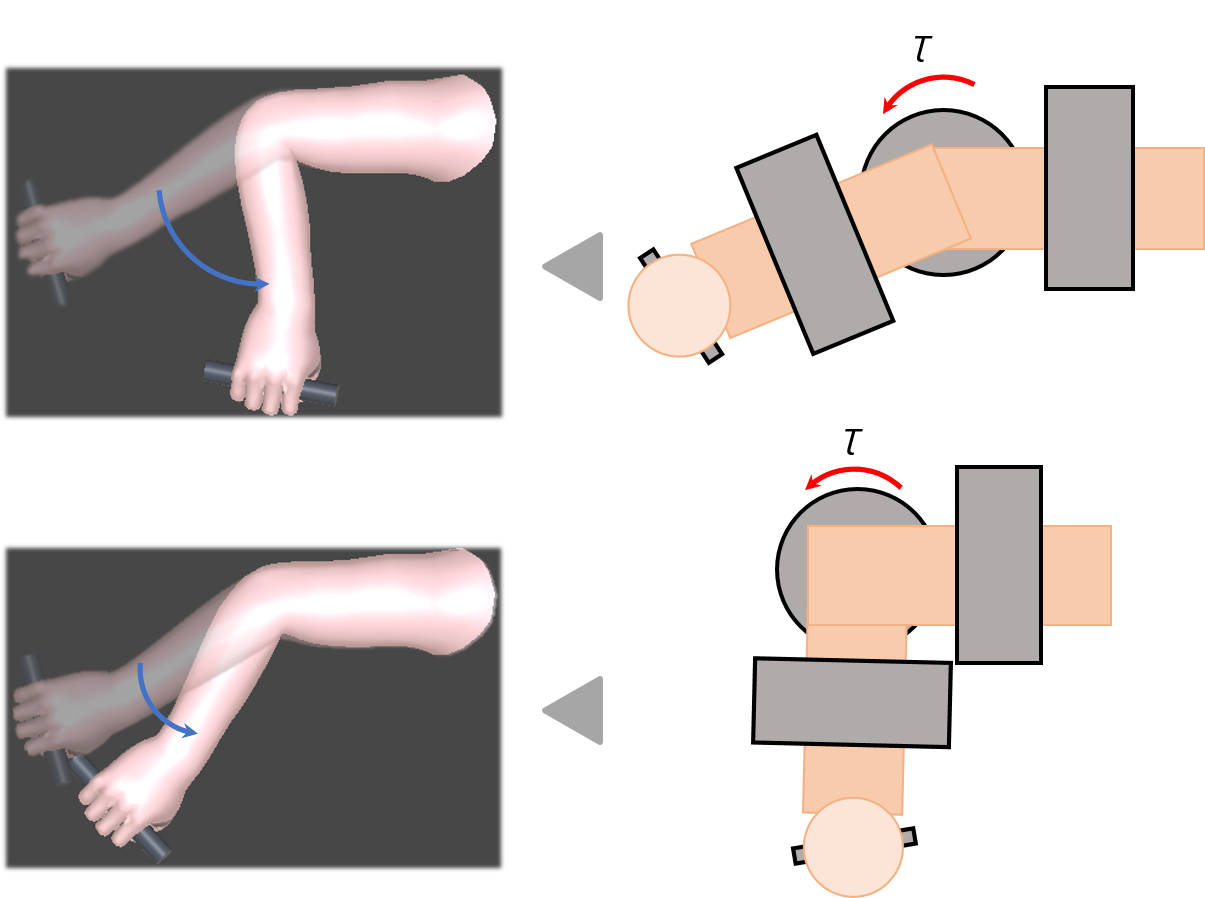
The joints in the dynamic model used in Motion-Less VR are given viscoelastic properties to stabilize motion and express the range of motion.
Through experiments, we investigate the user's ability to adapt to changes in viscoelastic properties. Motion-Less VR assumes that the user's body is immobilized.
On the other hand, the body's structure makes how muscles exert force differently depending on joint angles. Therefore, it is necessary to convert the user's motion intention
according to the fixed posture of the actual body into an appropriate form as an input signal for the virtual body. We are studying a method based on human characteristics and structure for this conversion.
Moreover, in Motion-less VR, the tactile sensation is presented to humans by electrical stimulation. Electrical stimulation directly fires the nerves of the mechanoreceptors to give tactile sensations to humans without force sense.
Each of the four mechanoreceptors receives different stimuli, and the integration of the obtained stimuli gives the human judges what kind of tactile sensation. Therefore, we aim to present humans with various tactile sensations by realizing a system
that uses electrical stimulation based on this principle to stimulate each receptor separately. We are currently working on giving the frictional sense obtained when coming into contact with an object, especially focussing on giving the sensation to the sole as a key issue for walking.
