TOP


FRIC : A Lower Limb Maneuvering Interface Using Dimensional Scaling Bilateral Control
With recent advances in communication technology, “telexistence technology” has drawn significant attention. This technology enables remote operation of robots, providing an immersive experience akin to being physically present at the site.
Numerous proof-of-concept experiments and demonstrations utilizing telexistence technology are being conducted toward societal implementation.
However, in many such systems,
operate the entire robot solely with a handheld controller,
requiring mode switching each time the operator transitions between locomotion control and upper-body control.
As a result, issues such as complicated operation and reduced work efficiency have been pointed out,
suggesting limitations to controlling both the upper and lower bodies of a remote robot with a single controller.
Source: Robust Immersive Telepresence and Mobile Telemanipulation: NimbRo wins ANA Avatar XPRIZE Finals
Therefore, a control method that distinguishes controllers for upper-body and lower-body operations in remote robots is currently attracting attention. In competitions where teams compete to complete predefined tasks in the shortest time, teams that differentiated controls for the upper and lower body, as shown in the figure, have won.
This control method eliminates the need for switching operations required when using a single controller. Furthermore, operating the robot by moving its lower body while steering its upper body aligns with actions humans naturally perform, enabling more intuitive control. Consequently, distinguishing controllers for the upper and lower limbs is considered crucial from an operational efficiency perspective.
This control method eliminates the need for switching operations required when using a single controller. Furthermore, operating the robot by moving its lower body while steering its upper body aligns with actions humans naturally perform, enabling more intuitive control. Consequently, distinguishing controllers for the upper and lower limbs is considered crucial from an operational efficiency perspective.
In addition to the aforementioned division of control between the upper and lower limbs, we also considered haptic feedback to be crucial.
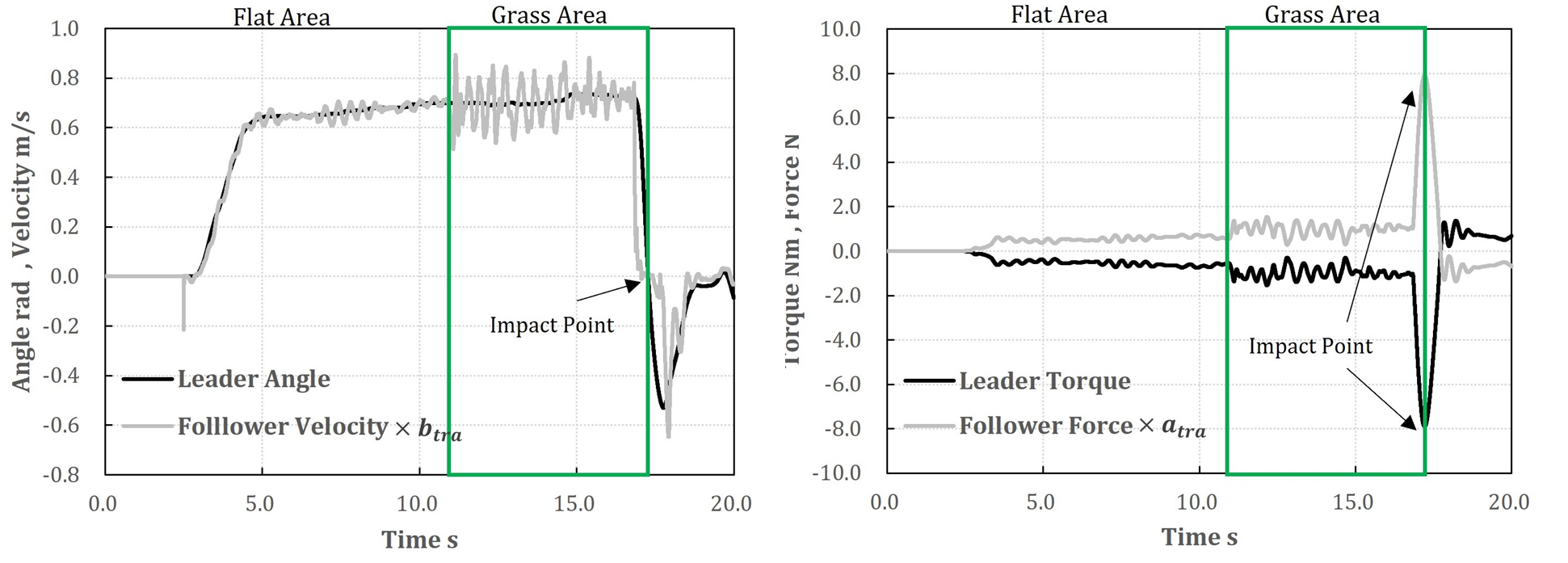
Haptic feedback allows the operator to perceive contact with objects and the magnitude of force involved without switching video feeds or splitting the field of view. This not only increases the information available for decision-making but also enables operation closer to our natural human senses, similar to how we perceive force in daily life. Due to these numerous advantages, force feedback has become relatively commonplace in upper-body robot operation. However, for lower-body operation targeting wheeled mobile robots, instances of force feedback implementation are extremely rare, and those that exist did not present realistic force sensations.

Source: Analysis and Perspectives on the ANA Avatar XPRIZE Competition
The phenomenon where “realistic force feedback is not provided during lower-body operation of wheeled mobile robots” stems from reasons such as inconsistencies in the operable range.
For example, the typical operating range for a robot's upper body corresponds to the arm's range of motion, matching that of a human upper body.
However, while a robot's mobility range is essentially infinite, the operator's mobility range is finite and dependent on their location, creating a contradiction.
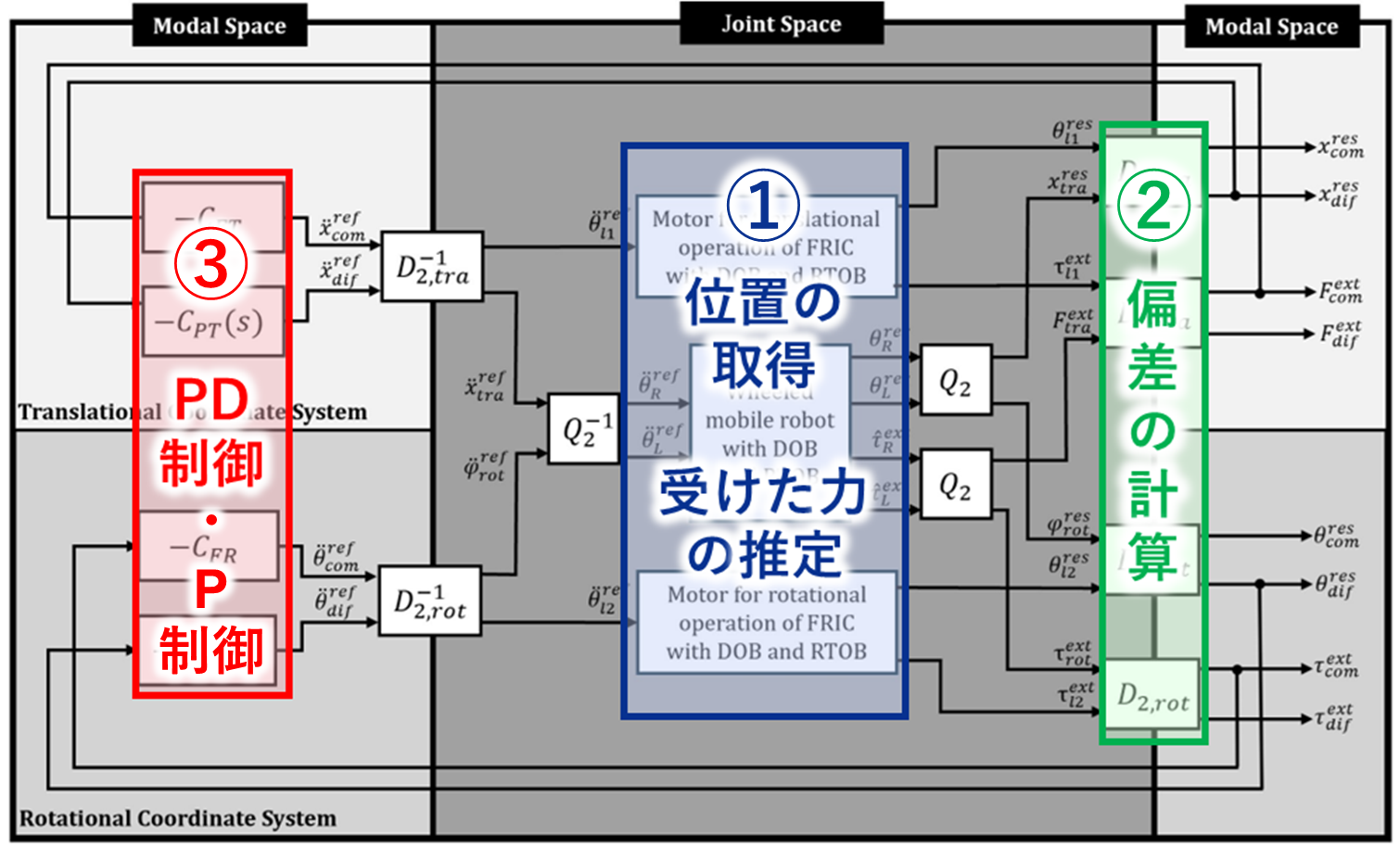
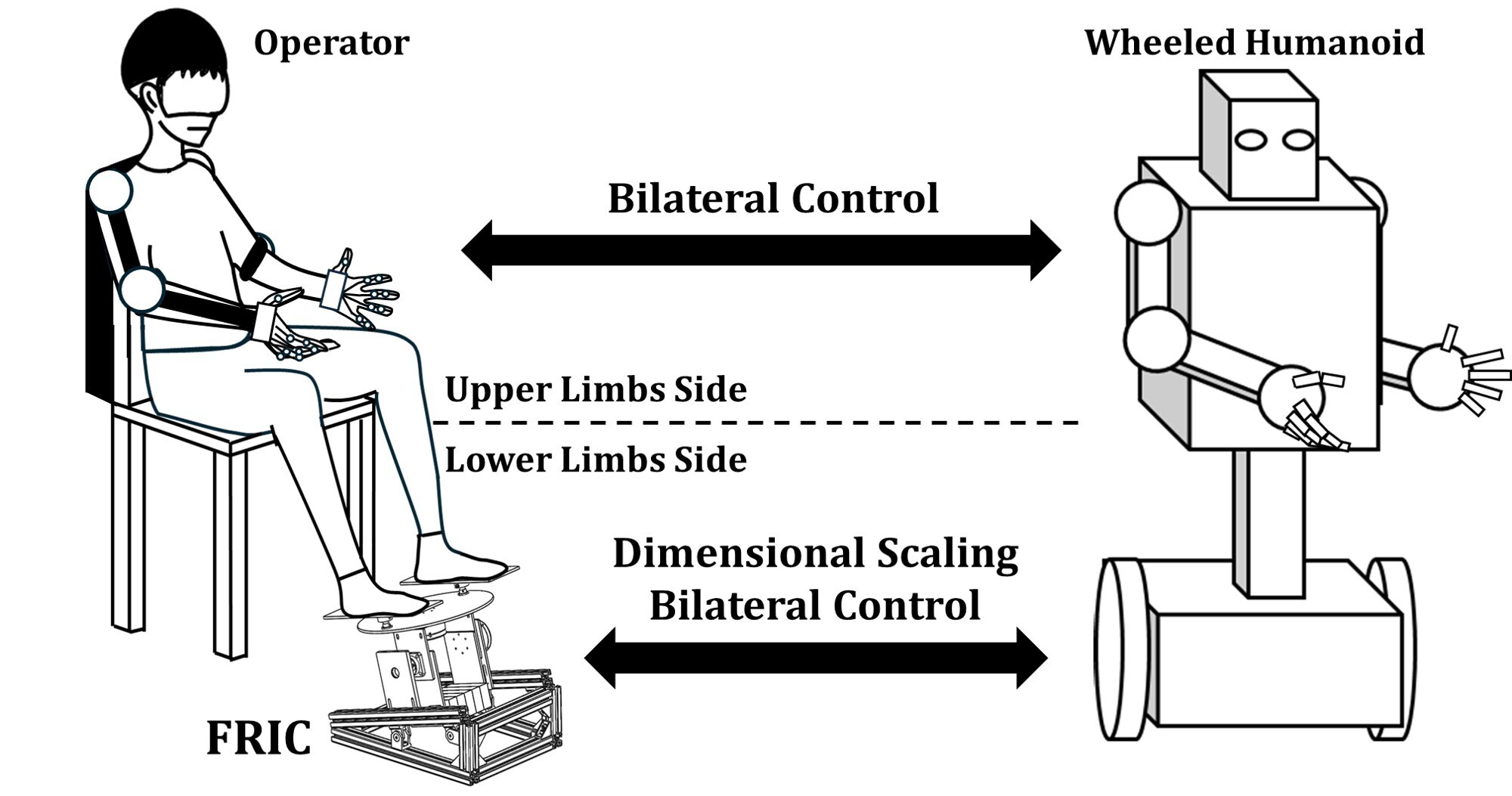
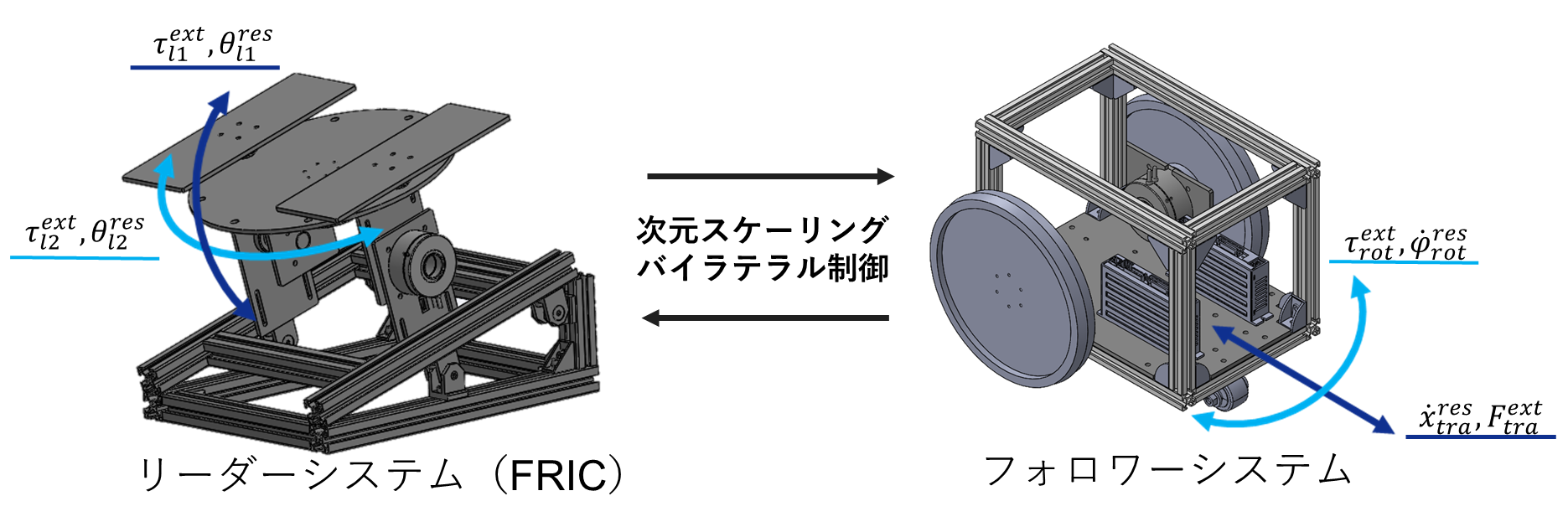
To resolve this contradiction in controllable ranges, we adopted bilateral control with dimensional scaling.
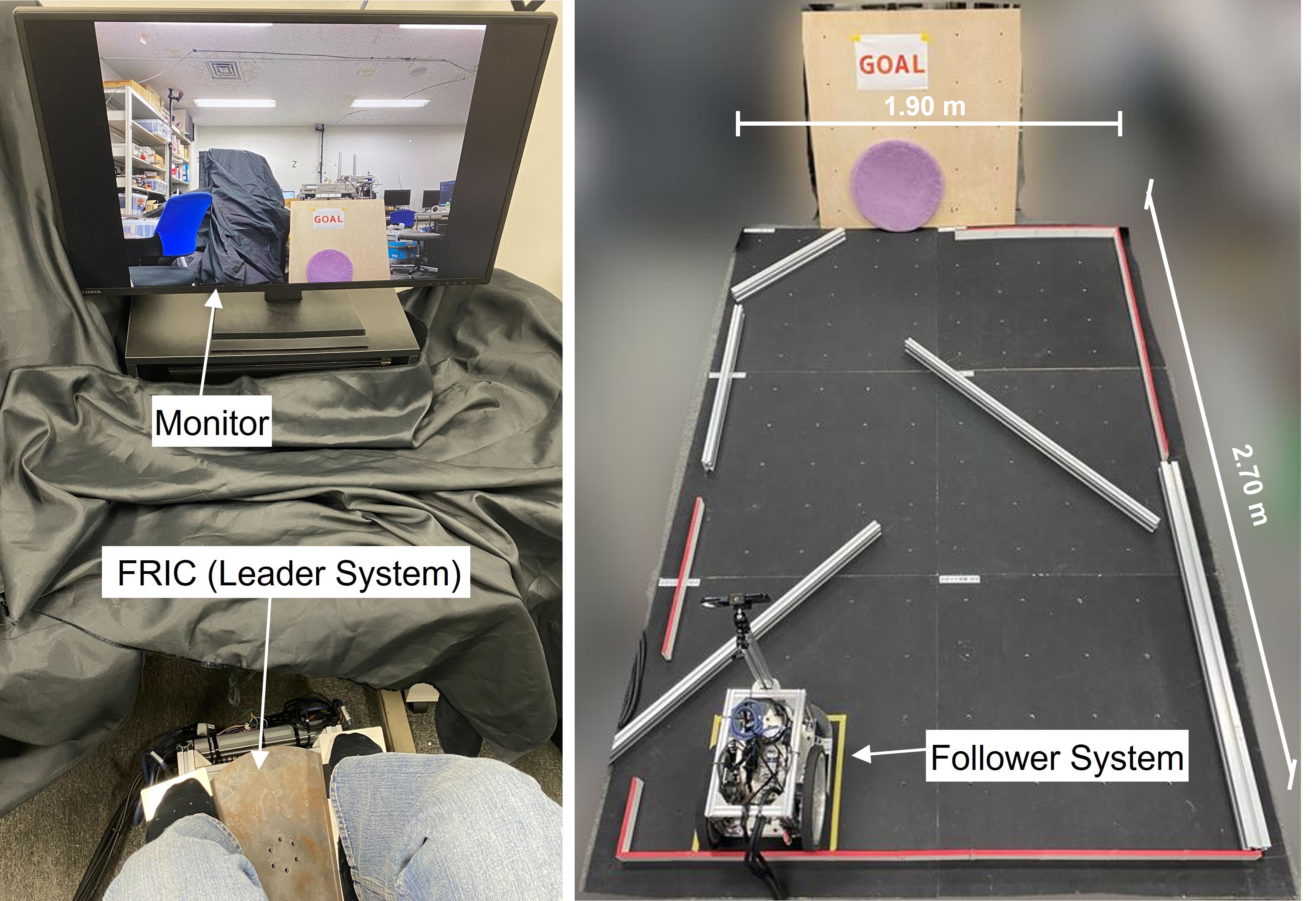
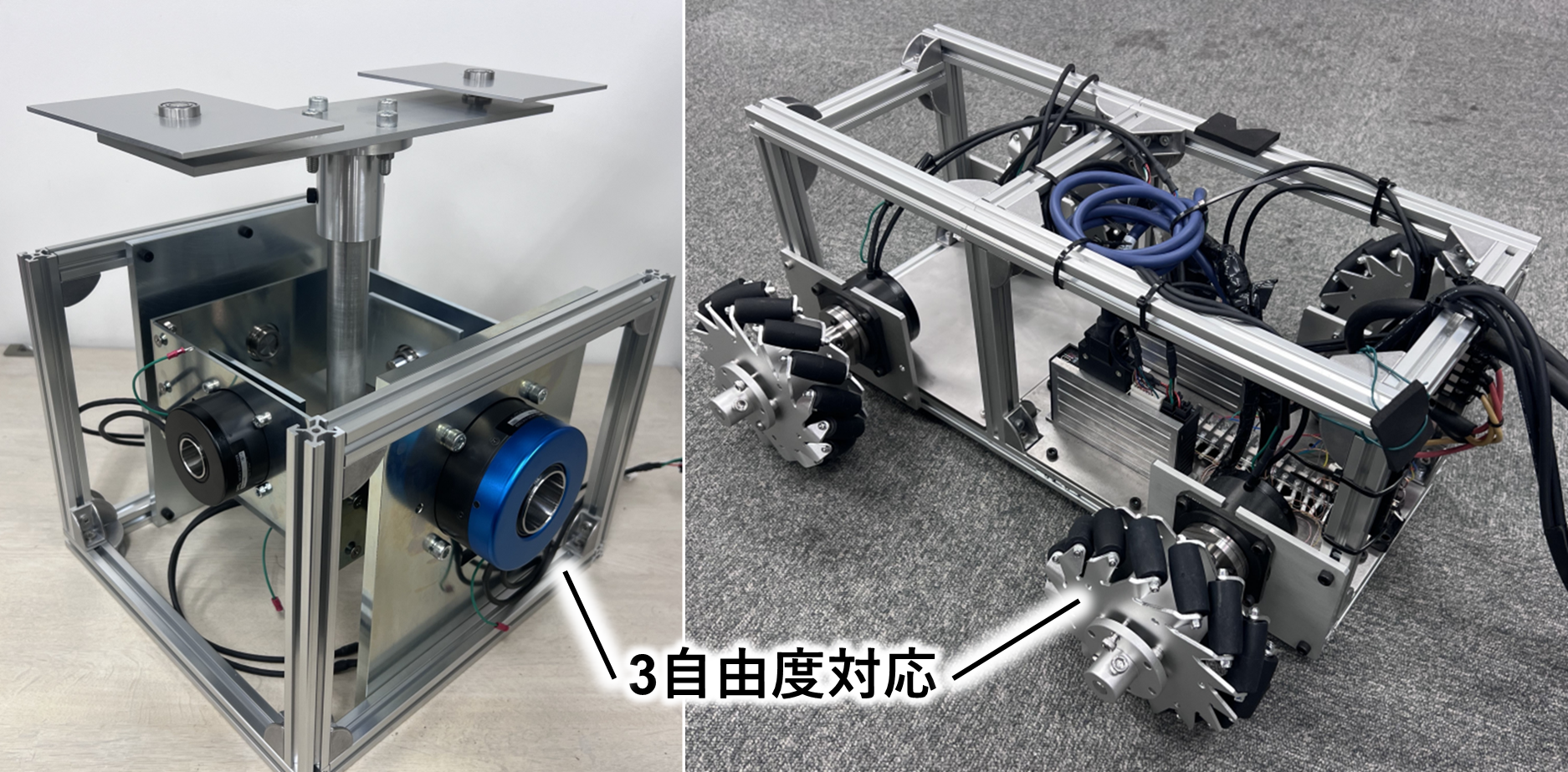
This enables the “FRIC (Foot Reactive and Intuitive Controller)” interface, which achieves both intuitive control using only the lower limbs from a fixed point and force feedback.
For example, the typical operating range for a robot's upper body corresponds to the arm's range of motion, matching that of a human upper body.
However, while a robot's mobility range is essentially infinite, the operator's mobility range is finite and dependent on their location, creating a contradiction.
To resolve this contradiction in controllable ranges, we adopted bilateral control with dimensional scaling.
This enables the “FRIC (Foot Reactive and Intuitive Controller)” interface, which achieves both intuitive control using only the lower limbs from a fixed point and force feedback.