TOP


Topological Mapping and Navigation using Monocular Camera
This research aims to construct topological maps and achieve visual navigation.
In autonomous fields, map construction is essential for environmental understanding and navigation.
Maps enable robots to localize, plan routes, and execute tasks efficiently.
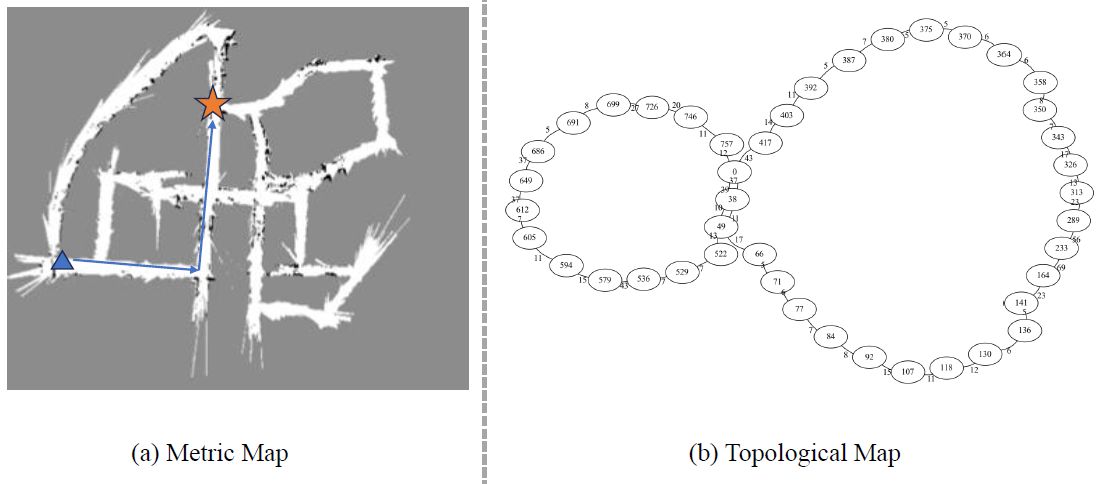
There are two primary types of maps: metric maps and topological maps.
Metric maps provide precise spatial information by measuring specific coordinates, making them suitable for tasks like localization and path planning.
In contrast, topological maps describe the connectivity of environments to represent spatial structures, reducing modeling complexity and making them ideal for large-scale, dynamic environments.
Moreover, humans often rely less on precise distances or spatial details and instead remember specific locations and perform actions accordingly, a characteristic that aligns well with topological maps.
We address the problem of goal-directed visual navigation based on topological maps.
Given a series of observation images, we construct a topological map.
A topological map represents important locations (nodes) within an environment and the connections between them.
Here, a node refers to a point representing significant features of an image selected during observation, with each node linked to its corresponding observation image.
During navigation, using the goal image and the current observation image, the robot identifies its own position and the goal position.
Then, it selects a sequence of nodes on the topological map, that is, a series of nodes constituting the path from the initial position to the goal position. By comparing the observed images with the selected sequence of nodes, the robot derives a corresponding series of actions. In this way, the robot can reach the goal position.
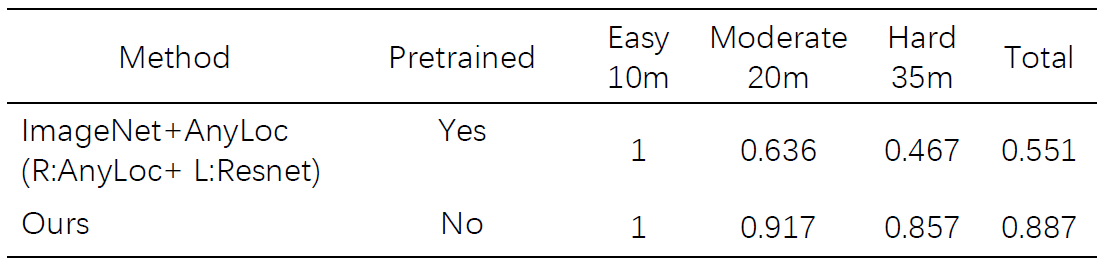
We compared the success rate with the previous baseline in the simulation environment.
The comparison was conducted on routes with various levels of difficulty, and the results showed that our method outperformed the ResNet-based approach on all routes, even without pretraining.
This provides a solution for achieving rapid topological map construction and navigation in unknown environments.
Researcher

M2
Wenzheng Zhang