TOP

Simultaneous tracking and charging function using wireless power transfer robot
In recent years, the development of wireless power transmission technology, which allows power to be transmitted wirelessly,
has raised expectations for resolving wired connection limitations. However, wireless power transmission causes power loss if the appropriate distance
between the power supply target and the power supply side cannot be maintained. To avoid such power loss, maintaining maximum power transmission efficiency is necessary.
We have proposed a wireless power transfer robot that combines an autonomous mobile robot and wireless power transfer technology. We aim to realize a tracking power transfer function that performs wireless power transfer
while following a moving object. In this method, the wireless power charging robot moves in such a way as to eliminate the power loss of wireless power charging, thereby realizing a highly efficient power charging function that eliminates location and connection limitations.
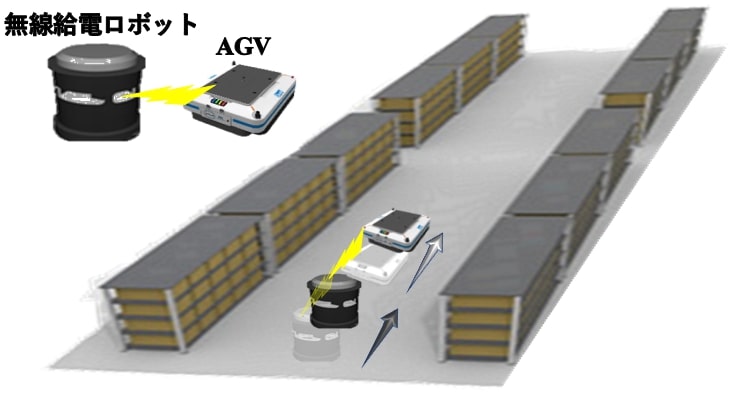
By applying this method to AGVs (Automated Guided Vehicles) used in factories, a highly efficient power supply can be achieved without restricting the movement of AGVs.
In addition, since wireless power transfer robots can supply power to AGVs in motion, This system can keep AGVs in motion semi-permanently. So This method not only reduces operator workload and costs,
which are advantages of conventional wireless power supply systems but also improves productivity.
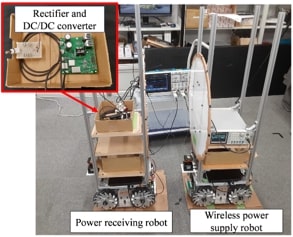
Currently, we are designing two functions. First is a tracking function that controls the relative position of the wireless power transfer robot and the power transfer target, such as an AGV, to remain constant.
The second is a wireless power transfer function that can feed power efficiently even when the distance between the coils during the tracking varies. We are also evaluating the performance of the tracking function
by integrating the tracking function and the wireless power transfer function.
Researcher

M2
Toshiki Shimizu

M1
Taiki Kudo

B4
Tomoki Takadera

B4
Kosei Takai