TOP


Mapping with SLAM using architectural floor plans
Maps are essential in autonomous mobile robots. Without a map, the robot would have to proceed by groping and would not be able to complete its tasks efficiently. Major technology for mapping is called SLAM. To briefly explain the SLAM algorithm,
first, that uses sensors to obtain the surrounding geometry at two points A and B, which are somewhat close. Then two sensor data Data_A and Data_B, have the same shape. The map becomes larger by align Data_A to Data_B using these same landmarks.
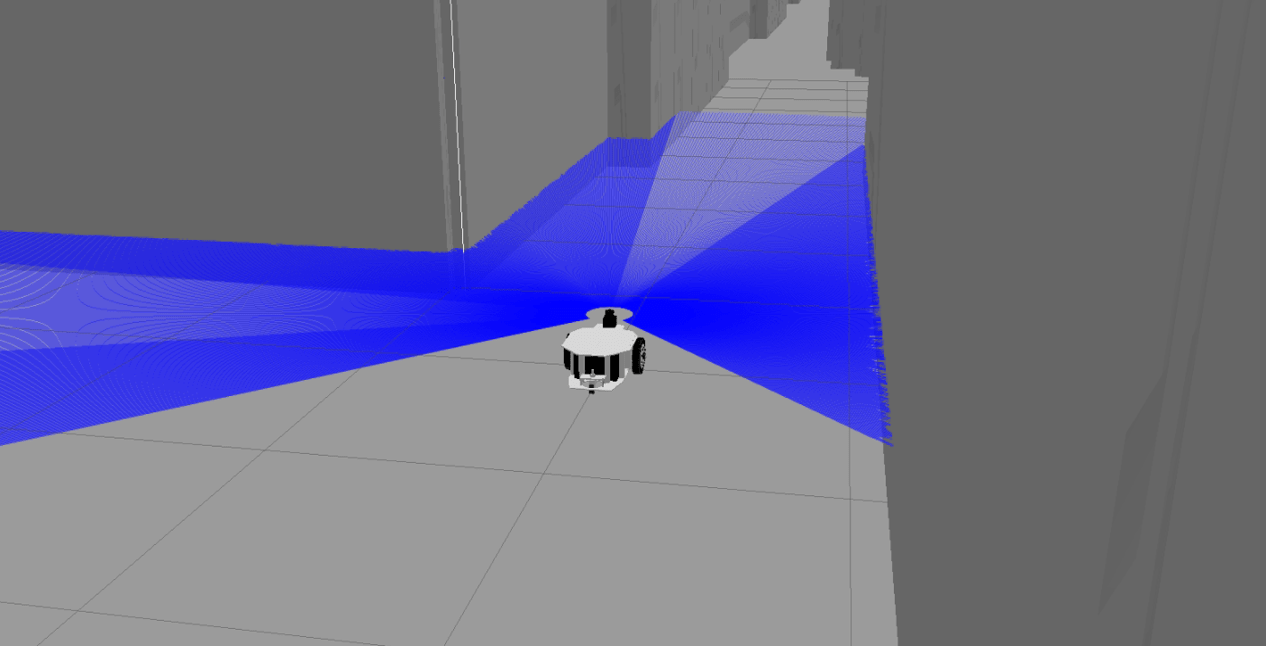
This process is repeated to construct the map, but the problem is that the sensor error increase with each iteration. The following figure shows how the robot simulator was used to acquire the environmental geometry.
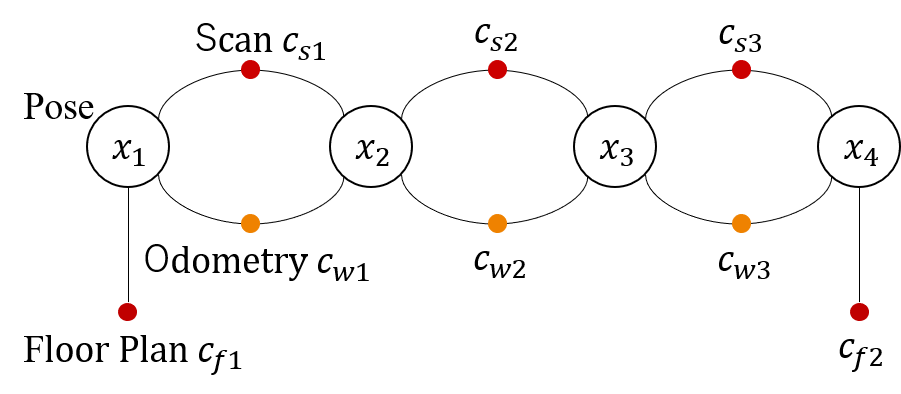
We propose a graph-based SLAM that uses architectural floor plans to reduce errors. Graph-based SLAM is a method of modeling SLAM using graph structures. The nodes represent a robot pose, and the edges represent the relative pose between nodes.
The proposed method adds robot poses estimated from the architectural floor plan as edges to the conventional graph. Because the robot pose estimated by the traditional SLAM method and the robot pose estimated from architectural floor plans are different,
inconsistency occurs in the graph. Our method optimize the nodes so that this discrepancy minimizes (as if trusting architectural floor plans) to construct a highly accurate map. The following figure shows the model of the graph in the proposed method.
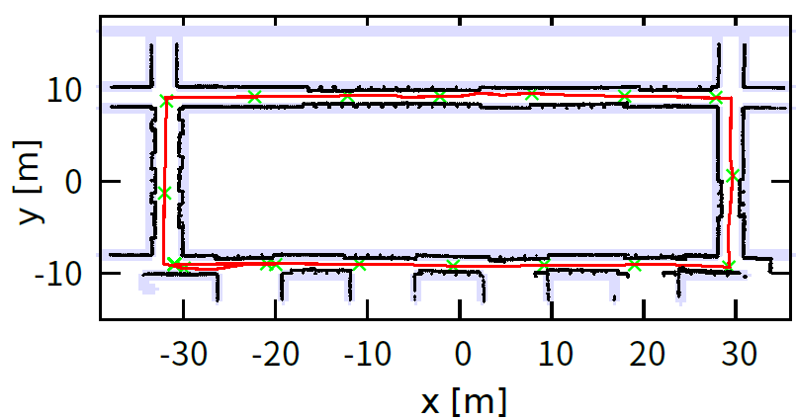
Comparing the proposed method with the conventional method using simulation showed that our method improves map accuracy and decreases computational cost. The following figure shows the actual map we built.
Also, unlike traditional methods, the proposed method can perform graph optimization at arbitrary times. Therefore, the proposed method also allows more flexible trade-offs between map accuracy and computational cost.
The proposed method is to merge human-made and robot-made products. However, our human activity space is not maintained with robots in mind. Therefore, I believe that this kind of hybrid system, with the help of human hands,
can overcome the barrier to the practical use of robots.
Researcher
D3Masahiko Hoshi