TOP


建築図面を活用したSLAMによる地図構築
自律移動において地図は非常に重要です。地図が無ければロボットは手探りで進まなければならず、効率的にタスクをこなせないでしょう。
地図を構築する技術として主流であるのがSLAMと呼ばれるものです。SLAMのアルゴリズムを簡単に説明すると、
ある程度近い2つの地点A, Bで周辺の形状をセンサで調べたとします。すると2つのセンサデータData_AとData_Bで同じ形状の箇所があります。
この共通の箇所を目印にData_AとData_Bをマッチングさせることで、地図が大きくなります。これを繰り返すことで地図を構築しますが、
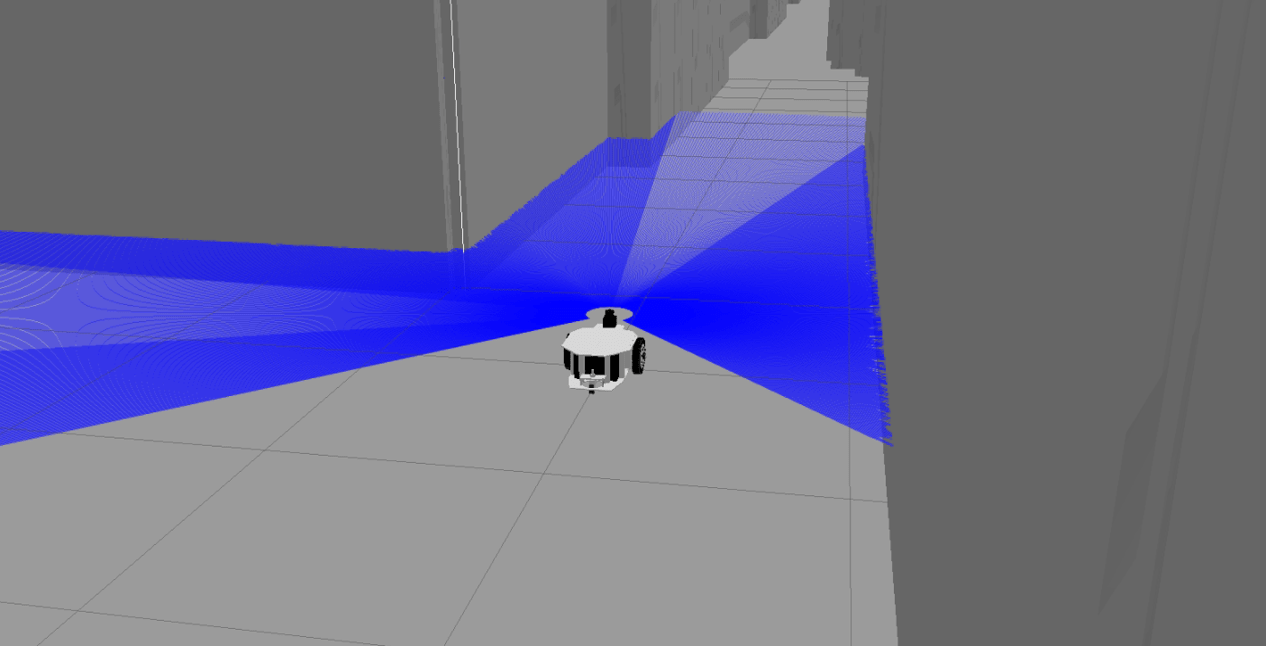
センサには誤差があるため、繰り返すごとに誤差が大きくなっていくという問題があります。隣の図はロボットシミュレータを用いて環境形状を取得したときの様子です。
本研究では誤差を軽減するために、建築図面を活用したグラフベースSLAMを提案しています。
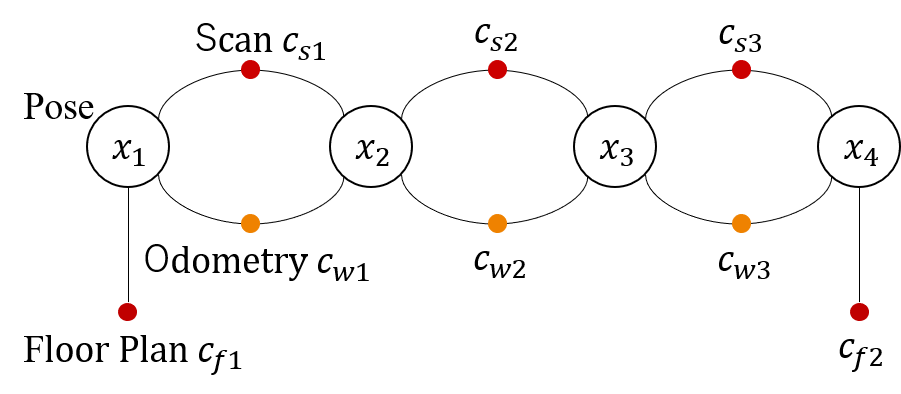
グラフベースSLAMとは、グラフ構造を用いてSLAMをモデル化する手法です。頂点はロボットやランドマークの位置を、辺はノード間の相対位置を表しています。
提案手法は、従来のグラフに建築図面から推定された自己位置を辺として追加します。従来のSLAM手法で推定した自己位置と、建築図面から推定した自己位置は異なるため、
グラフに矛盾が生じます。この矛盾が最小化されるように(建築図面を信頼するように)頂点を最適化することで高精度な地図を構築できるという仕組みです。
隣の図は提案手法におけるグラフのモデルを表しています。
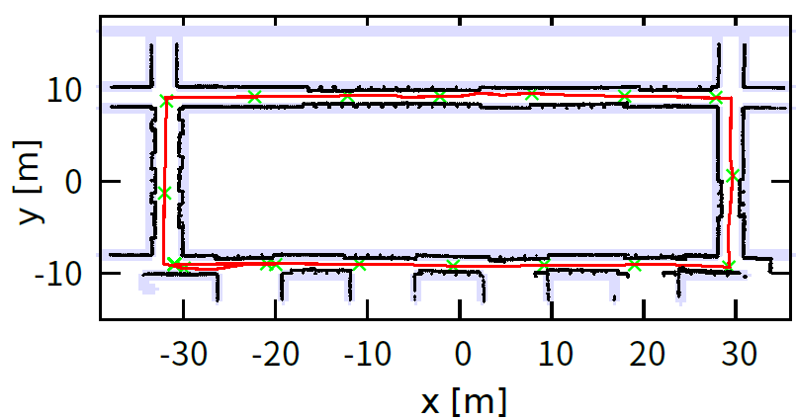
シミュレーションを用いて提案手法を従来手法と比較した結果、地図精度の向上、計算コストの低下が確認できました。
隣の図は実際に作成した地図です。また提案手法は、従来手法と異なりグラフ最適化を任意のタイミングで実行できるため、
地図精度と計算コストのトレードオフをより柔軟に行えるという利点もあります。
提案手法は、人の手で作ったものとロボットが作ったものを融合するというものでしたが、私達人間の活動空間はロボットを想定して整備されていないため、
こうした人の手を借りたハイブリッドシステムによってロボット実用化の壁を乗り越えることが出来るのではないかと思います。
研究の担当者
D3星雅彦