TOP

自律移動ロボットにおける自己位置推定の信頼度(Localizability)の推定
自律移動ロボットにおいて自己位置推定の信頼度は重要な要素です。
自律移動ロボットは、地図上での自身の位置を推定しながらナビゲーションを行っています。
そのため、自己位置推定に失敗してしまうと,ロボットがゴールまで到達できなかったり、事故を起こしてしまう危険性があります。
そのため、地図上の各位置での自己位置推定の信頼度 (Localizability) を推定することで、安全なナビゲーションを行うことが期待できます。
我々の研究では、レーザセンサによるロボットの自己位置推定を対象としています。
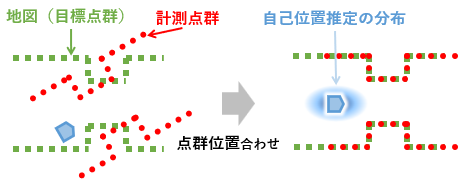
レーザセンサでの自己位置推定では、図のように、センサで計測した点群を地図と照合して位置合わせを行います。
点群の位置合わせでは、スキャン点群の形状に特徴があるほど正確な位置合わせが可能です。
逆に、特徴が無いような場所では、正確に位置合わせ出来ず、自己位置推定に失敗してしまう可能性があります。
特に、平行な壁のみの廊下などでは、直線状のスキャンが取得されるので、スキャン点群が廊下の長手方向にどの位置でも位置合わせが出来てしまうという問題があります。
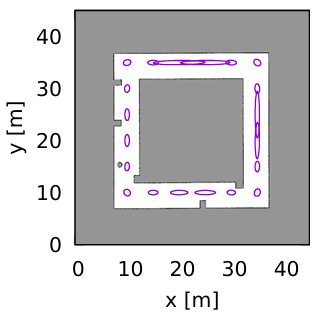
次の図は、実験により推定したロボットの自己位置推定の信頼度の分布を示しています。
楕円がその位置での自己位置推定の信頼度を示しており、小さいほど正確に自己位置推定ができます。
左と下の廊下は柱などがあり特徴的な形状の環境であるため、楕円が小さくなっており正確に自己位置推定できることを示しています。
逆に上と右の廊下は、廊下の長手方向に楕円が伸びていることが分かります。
これは、その方向に自己位置推定の誤差が生じやすいことを示しています。
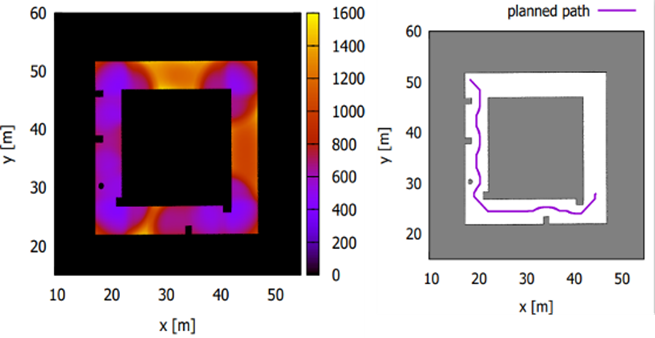
この自己位置推定の信頼度を経路計画時に考慮することで、ロボットの安全なナビゲーションを期待できます。
左の図は、各場所での自己位置推定の信頼度 (Localizability) のスカラ値を表したカラーマップです。
値が低い場所ほど正確に自己位置推定が出来る場所となっています。
Localizability を経路計画のコストとして使用することで、Localizabilityの値が低く正確に自己位置推定が出来る場所を通る経路を計画できます。
実験の結果により、Localizabilityを考慮した経路は、考慮していない経路と比較して自己位置推定の誤差が小さくなることが確認できました。
研究の担当者

B4
坪内勇斗