TOP


リアル身体での運動を伴わない身体没入型VRインタフェース
モーションキャプチャを用いた現行のVR(Virtual Reality)システムでは、バーチャルの身体の動きがリアルの身体で実行可能なものに制限されてしまいます。
例えば、リアル身体とスケールの異なるバーチャル身体を操作するとき動作によってはリアル身体が干渉してしまうことが考えられます。また、関節可動域以上の運動はバーチャル空間で行うことができません。
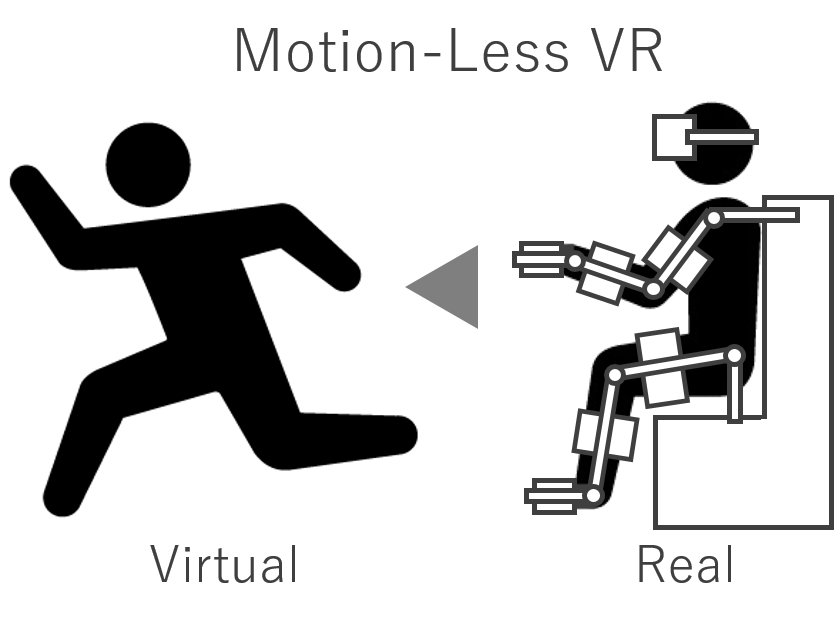
そこで、リアル身体での運動を伴わない身体没入型VRインターフェース「Motion-Less VR」という概念を提案し、身体の拡張を目指してその枠組みの中で様々な研究に取り組んでいます。
Motion-Less VRは、リアル身体での運動を抑制した状態で、運動意図を正確に読み取り、その意図に応じて適切に感覚情報を提示することで実現されます。
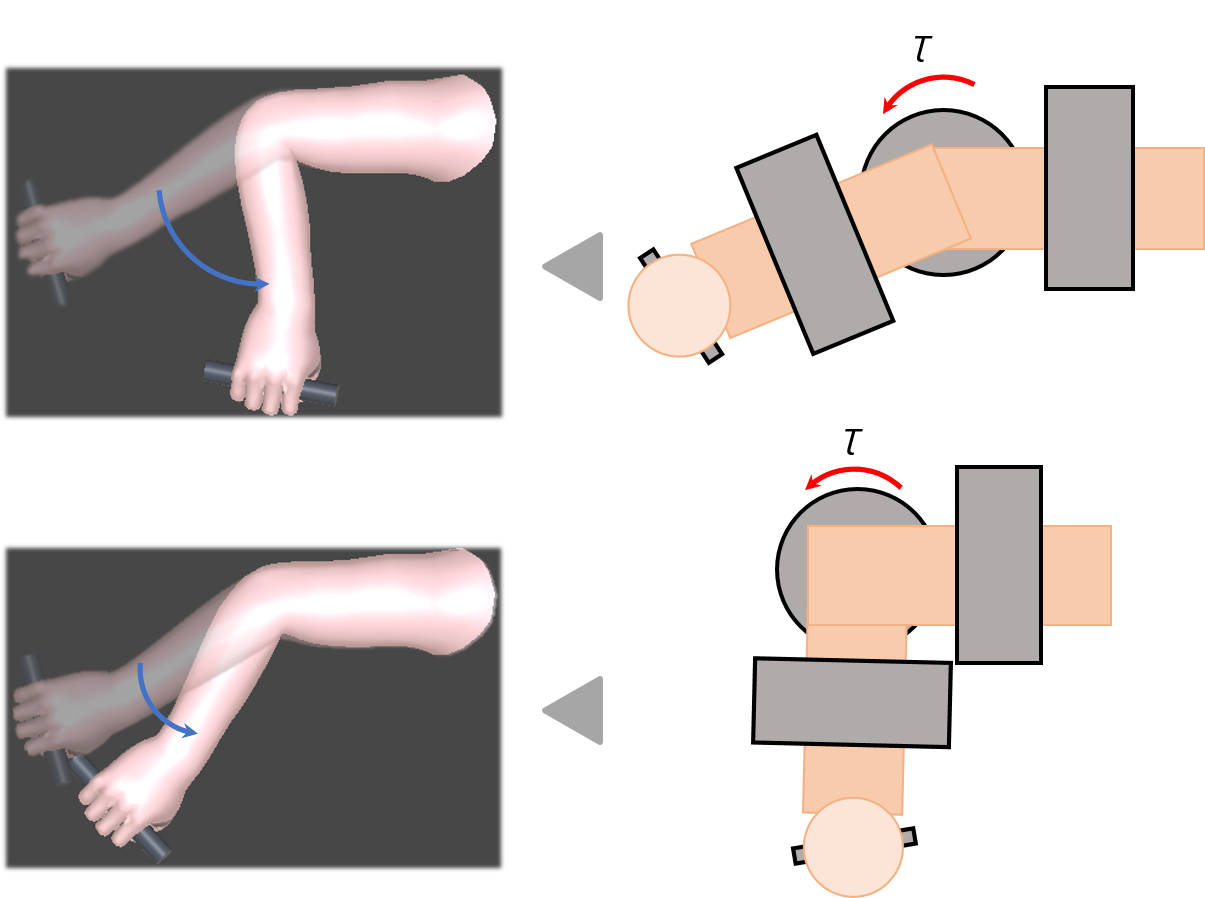
右図はMotion-Less VRを示指に適用した例です、ユーザが指を動かそうとした際に発生した力をセンサで取得し、力学に基づく形で運動意図の解釈を行い、
その結果をHMD(Head Mounted
Display)を用いて視覚へ提示しています。システムの評価実験を行ったところ、市販のハンドトラッキングデバイスと近い操作性が担保されていることが確認されました。
Motion-Less VRに用いられる動力学モデルの関節には、運動の安定化や可動域表現の為に粘弾性特性が付与されています。
この粘弾性特性の様々な変更に対するユーザの適応能力について、実験を通した調査を行っています。またMotion-Less VRでは身体を固定することが前提となっています。
一方で身体の構造上、関節角度に応じて、筋発揮の仕方は異なります。そこで、リアル身体の固定姿勢に応じたユーザの運動意図を、バーチャル身体の入力信号として、適切な形に変換することが必要となります。
この変換について、人間の特性や構造に基づいた手法の検討を進めています。
そして、Motion-less VRにおいて人間への触覚提示を電気刺激によって行っています。
電気刺激は機械受容器の神経を直接発火させることで、力覚によらず人間に触覚を提示します。
また、機械受容器は四つ存在し。それぞれが異なる刺激を受け取りますが、その得られた刺激の統合により、
どのような触覚が与えられたかを人間は判断しています。そこで、この原理を基に電気刺激を用いて、
各受容器を別々に刺激するシステムを実現し、人間に様々な触覚を提示することを目的としています。現在では、足裏に重きをおいて、
物体と接触した際に得られる摩擦感覚の提示に取り組んでいます。
