TOP


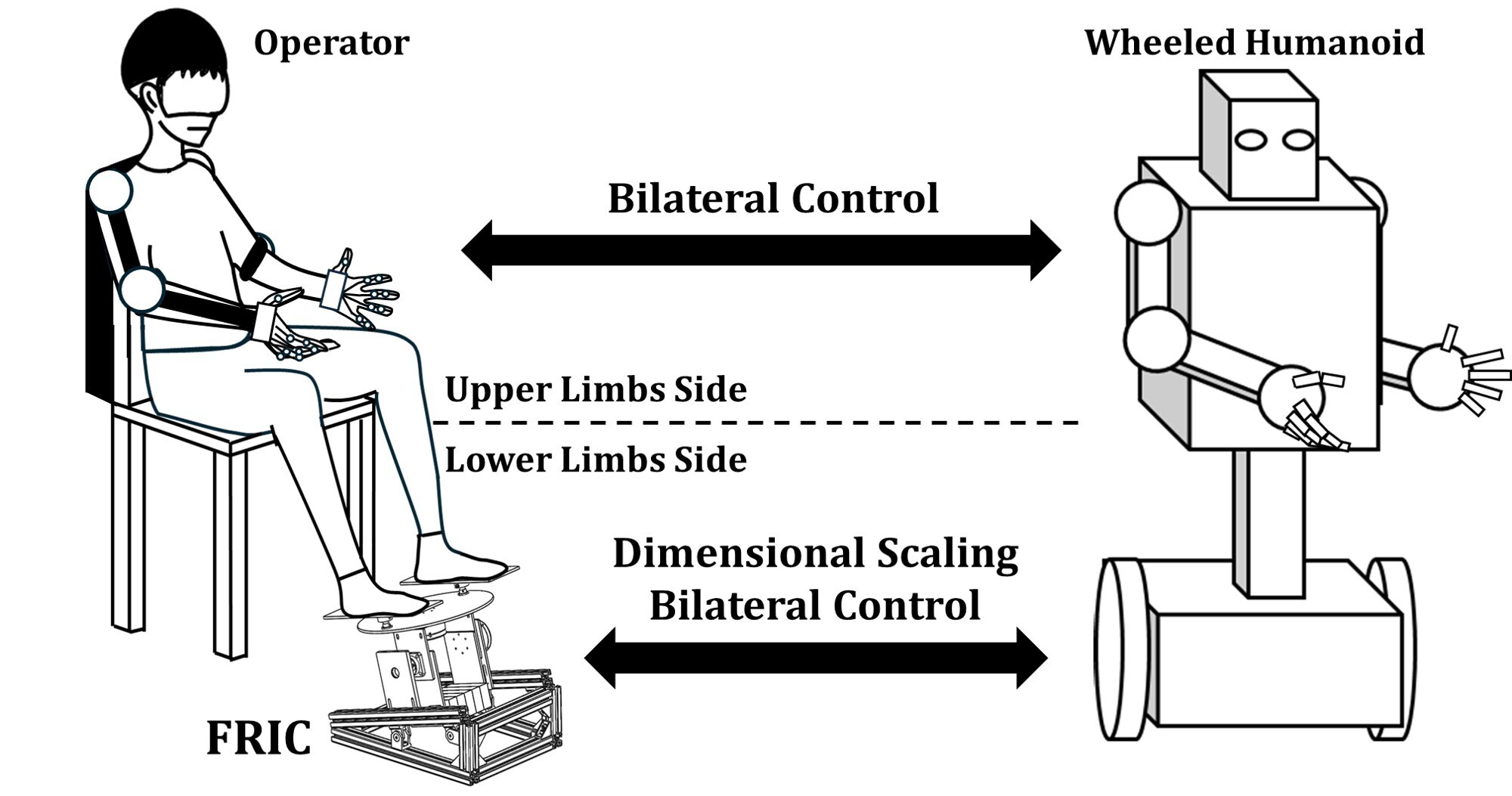
次元スケーリングバイラテラル制御を用いた下肢操縦インタフェース「FRIC」
近年の通信技術の発展に伴い、遠隔地からロボットを操作し、あたかもその場に存在しているかのような操作体験を可能にする「テレイグジスタンス技術」に注目が集まっています。
社会実装に向けて、テレイグジスタンス技術を用いた実証実験やデモンストレーションも数多く行われています。
しかし、そのようなシステムの多くでは、
手元のコントローラーのみでロボットの全身を操作しており、
移動操作と上半身操作を切り替えるたびにモード切替が必要となります。
その結果、操作の煩雑化や作業効率の低下が課題として指摘されており、 遠隔ロボットの上半身と下半身の操作を同一のコントローラーで担うことには限界があると考えられます。
その結果、操作の煩雑化や作業効率の低下が課題として指摘されており、 遠隔ロボットの上半身と下半身の操作を同一のコントローラーで担うことには限界があると考えられます。
引用元: Robust Immersive Telepresence and Mobile Telemanipulation: NimbRo wins ANA Avatar XPRIZE Finals
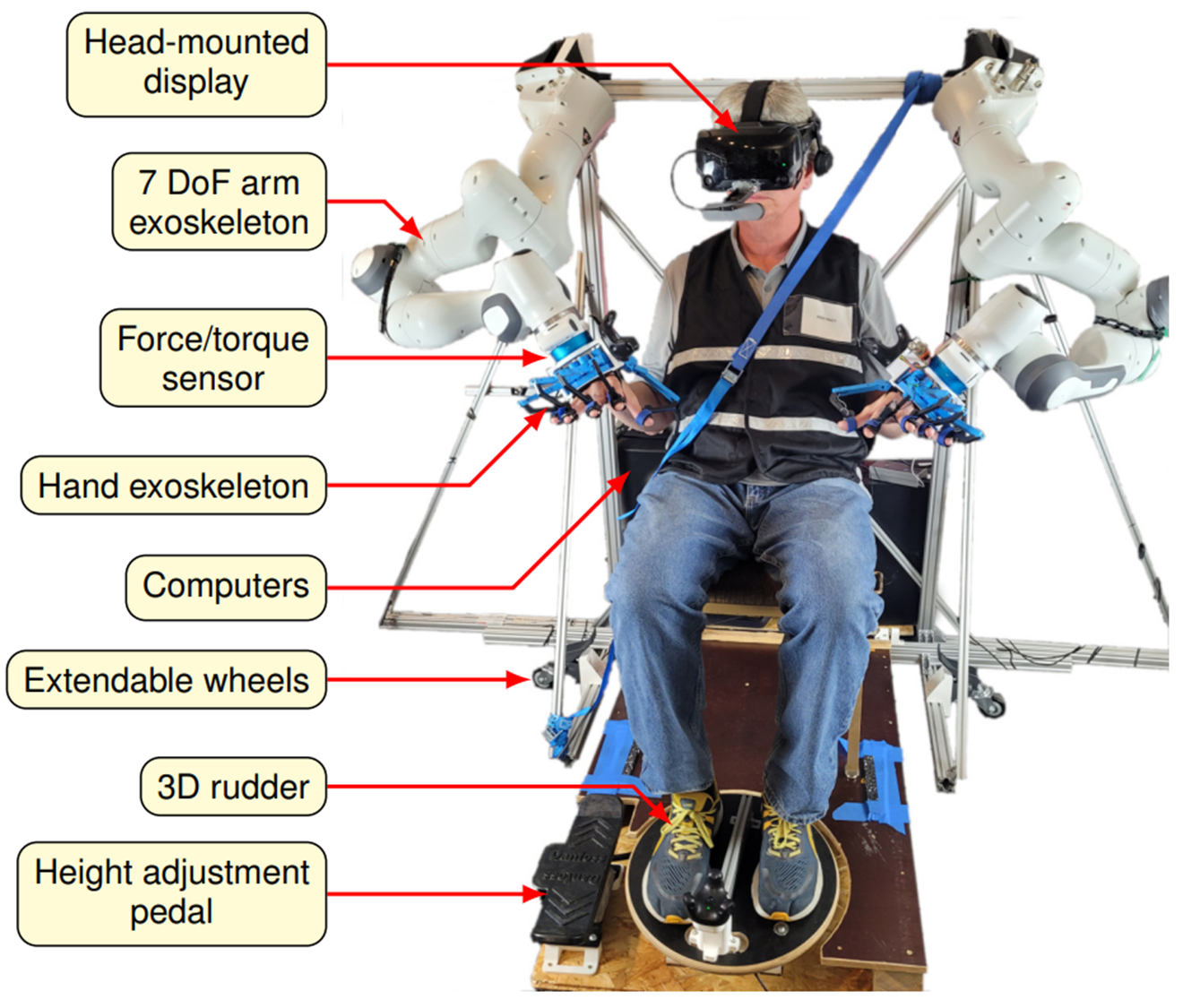
そのため現在、遠隔ロボットの上肢操作と下肢操作でコントローラーを区別する操作手法が注目されています。実際に設定されたタスク完了までの時間を競い合う大会では、図のように上半身と下半身で操作を区別したチームが優勝しています。
この操作手法では単一のコントローラーで操作していた際に必要であった操作の切り替えが不要な上、 ロボットを下半身で移動させ、上半身で操縦するといった操作が人間が普段から行う動作と一致しており、より自然な操作が可能になっています。このことから、上肢と下肢でコントローラーを区別するということが操作効率的な観点から重要であると考えられます。
この操作手法では単一のコントローラーで操作していた際に必要であった操作の切り替えが不要な上、 ロボットを下半身で移動させ、上半身で操縦するといった操作が人間が普段から行う動作と一致しており、より自然な操作が可能になっています。このことから、上肢と下肢でコントローラーを区別するということが操作効率的な観点から重要であると考えられます。
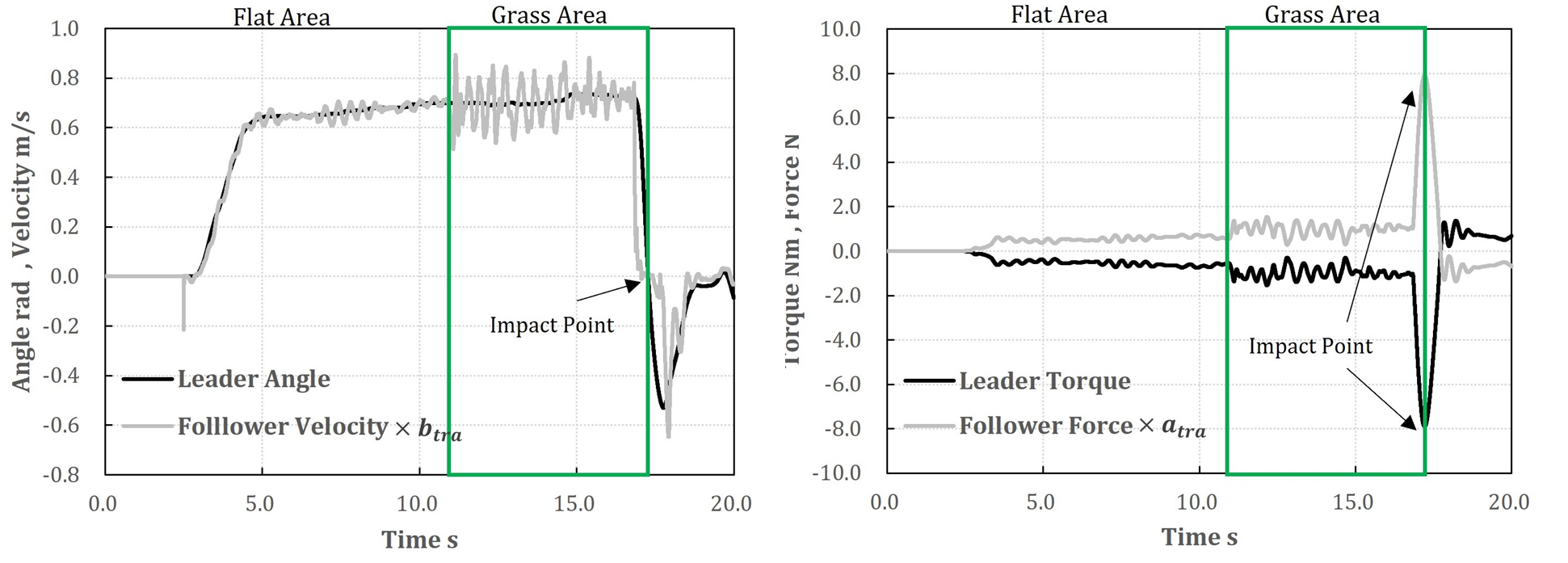
また我々は先述した上肢と下肢での操作分割に加え、力覚の提示も重要であると考えました。
力覚提示により、映像の切り替えや視野の分割を行うことなく、物体との接触の有無やその際の力の大きさなどを操縦者に伝達することができます。これにより、操作の判断材料を増やすことが可能になる上、我々が日常生活で力を感じているように、より人間本来の感覚に近い状態で操作を行うことができます。このような数々の利点からロボットの上半身操作においては力覚提示は比較的ありふれたものとなっています。しかし、車輪型移動ロボットを対象とした下半身操作では力覚提示が行われている事例が非常に数少なく、またそれらは現実の力覚を提示したものではありませんでした。
力覚提示により、映像の切り替えや視野の分割を行うことなく、物体との接触の有無やその際の力の大きさなどを操縦者に伝達することができます。これにより、操作の判断材料を増やすことが可能になる上、我々が日常生活で力を感じているように、より人間本来の感覚に近い状態で操作を行うことができます。このような数々の利点からロボットの上半身操作においては力覚提示は比較的ありふれたものとなっています。しかし、車輪型移動ロボットを対象とした下半身操作では力覚提示が行われている事例が非常に数少なく、またそれらは現実の力覚を提示したものではありませんでした。

引用元: Analysis and Perspectives on the ANA Avatar XPRIZE Competition
こういった「車輪型移動ロボットの下半身操作では現実の力覚提示が行われていない」という現象の背景には操作可能範囲の矛盾といった理由が存在します。
例えば一般的なロボットの上半身における操作範囲はアームの可動範囲であり、人間の上半身の可動範囲と一致します。
しかしながらロボットの移動範囲は基本的に無限であるのに対して、操縦者の移動可能範囲は滞在場所に依存して有限であり、矛盾しています。
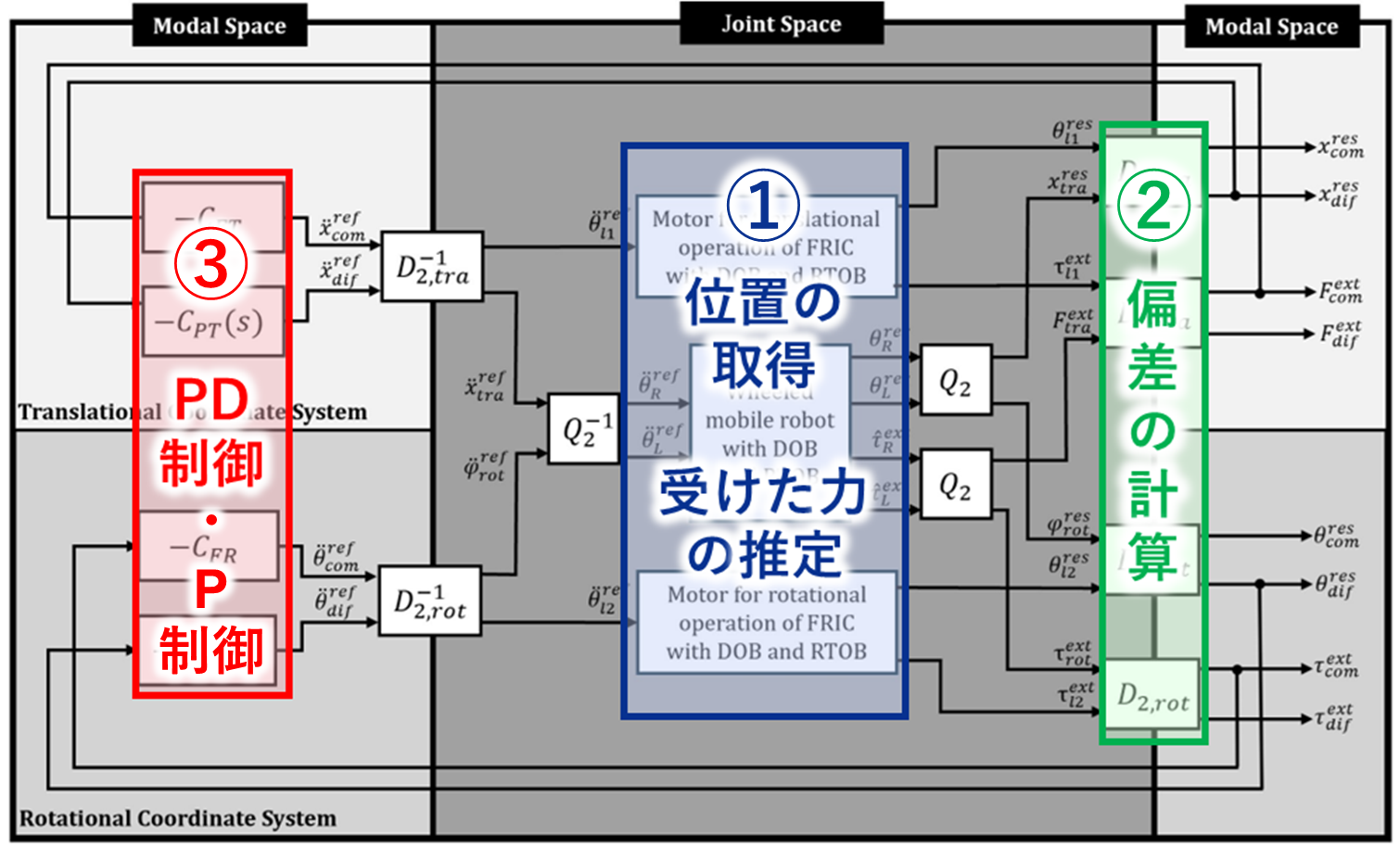
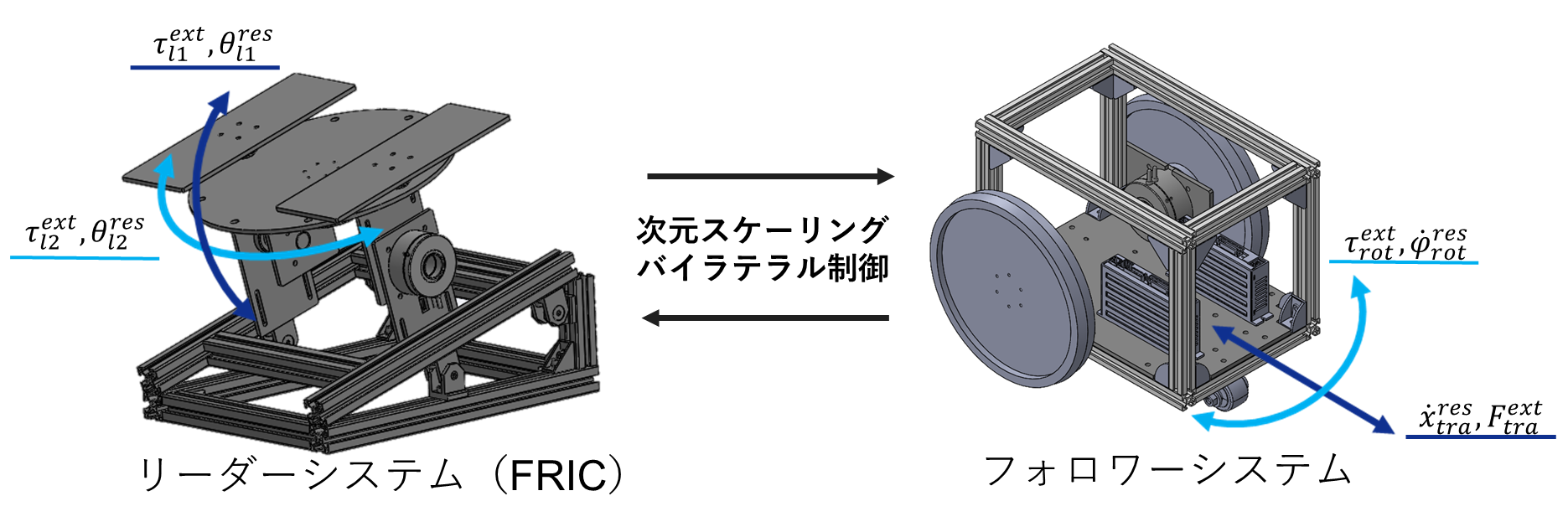
そこで我々は、操作可能範囲の矛盾を解決するため、次元スケーリングを適用したバイラテラル制御を採用しました。
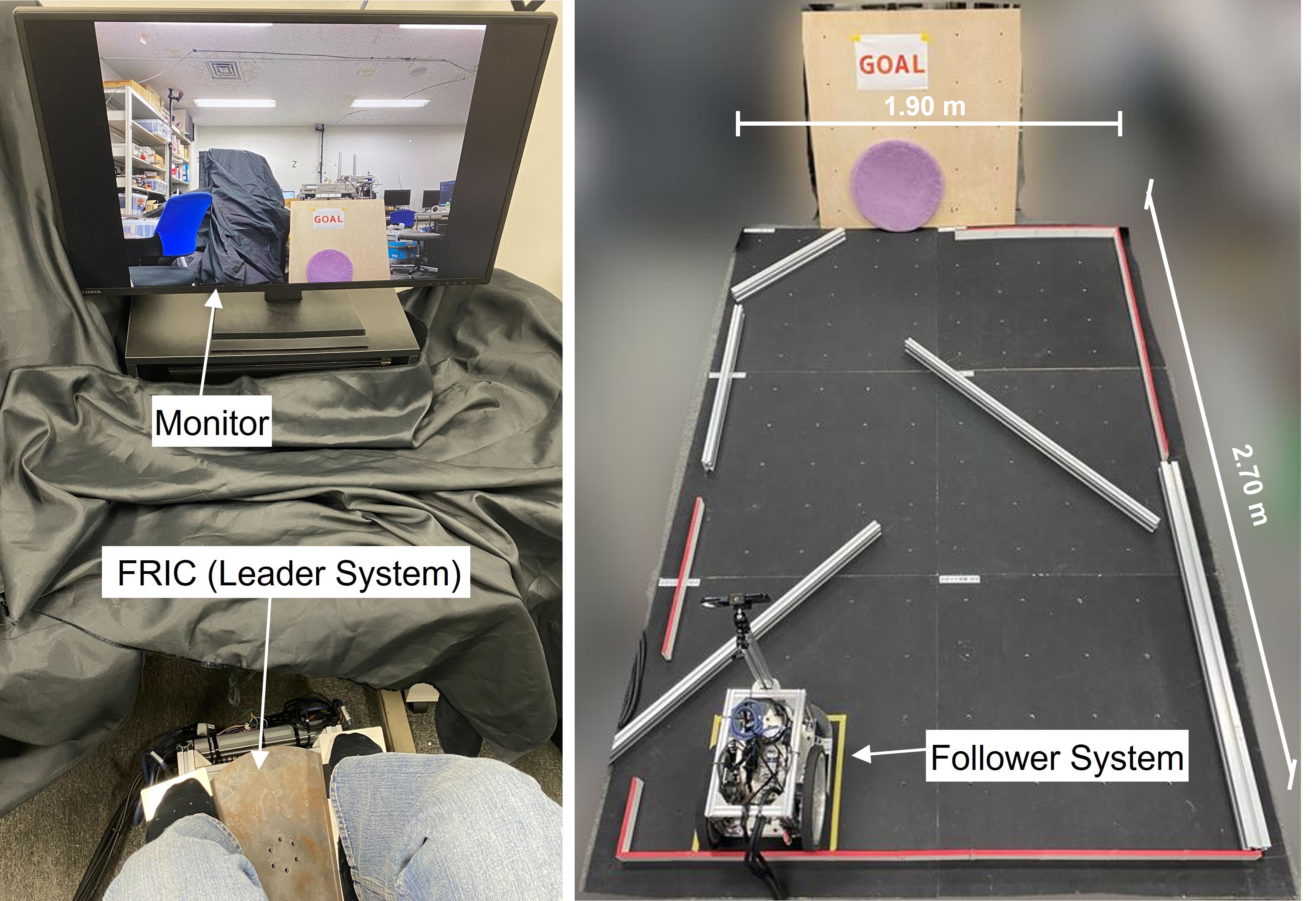
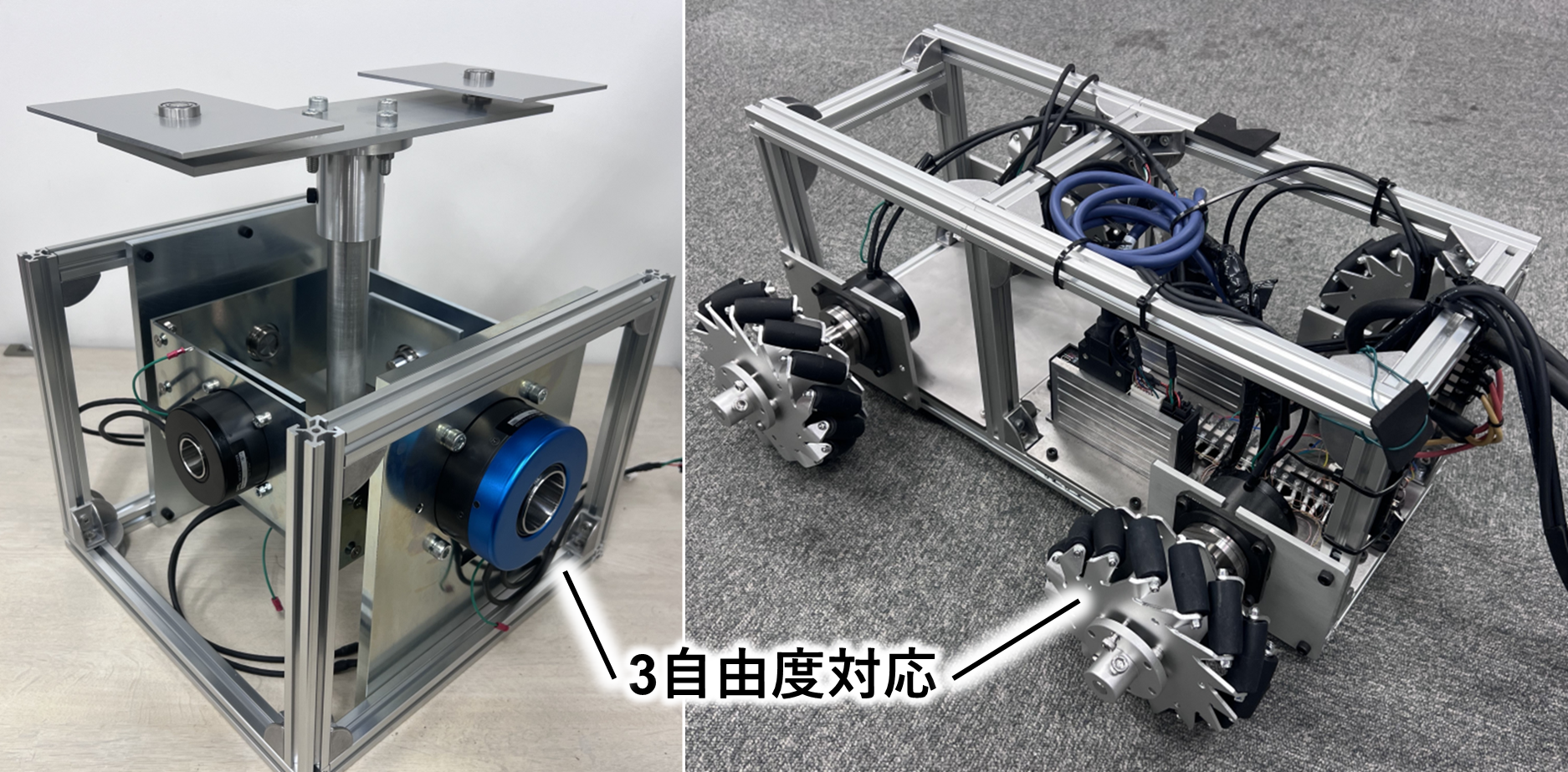
これにより、定点から下肢のみでの直感的な操縦と力覚提示を両立するインタフェース「FRIC(Foot Reactive and Intuitive Controller)」を実現しています。
例えば一般的なロボットの上半身における操作範囲はアームの可動範囲であり、人間の上半身の可動範囲と一致します。
しかしながらロボットの移動範囲は基本的に無限であるのに対して、操縦者の移動可能範囲は滞在場所に依存して有限であり、矛盾しています。
そこで我々は、操作可能範囲の矛盾を解決するため、次元スケーリングを適用したバイラテラル制御を採用しました。
これにより、定点から下肢のみでの直感的な操縦と力覚提示を両立するインタフェース「FRIC(Foot Reactive and Intuitive Controller)」を実現しています。