TOP


単眼カメラによるトポロジカル・マッピングとナビゲーション
本研究では、トポロジーマップを構築することで視覚ナビゲーションを実現します。
移動ロボットや自動運転の分野では、地図構築は環境理解とナビゲーションにおいて重要な役割を果たします。
地図を利用することで、ロボットは自己位置を特定し、経路を計画し、効率的にタスクを遂行できます。
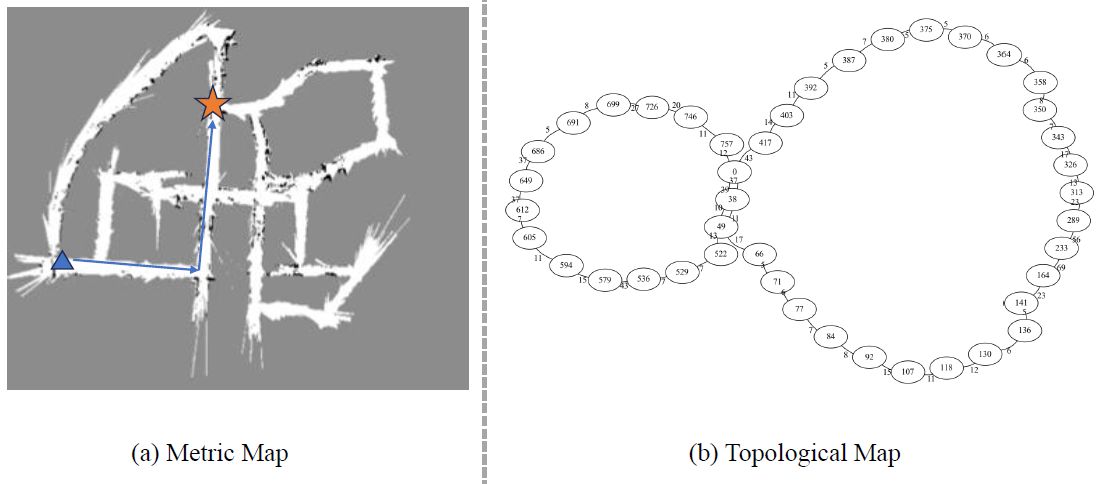
地図には主に、メトリックマップ(Metric Map)とトポロジーマップ(Topological Map)の2種類があります。
メトリックマップは、空間内の具体的な座標を測定して正確な空間情報を提供し、自己位置推定や経路計画に適しています。
一方、トポロジーマップは環境の接続関係を記述して空間構造を表現し、特に大規模で動的な環境に適しています。
また、人間は距離や空間の詳細よりも特定の地点を記憶し、その地点で適切な行動を取る傾向があります。
この特徴は、トポロジーマップを用いた効率的な環境モデリングと一致します。
私たちは、トポロジーマップに基づいた目標指向の視覚ナビゲーション問題に取り組みました。
一連の観測画像が与えられた場合、それに基づいてトポロジーマップを構築します。
トポロジーマップとは、環境内の重要な地点(ノード)とそれらの接続関係を表現した地図のことです。
ここで言うノードとは、観測時に選択された重要な画像の特徴を表すポイントであり、各ノードに対応する観測画像が紐づけられています。
ナビゲーション中、目標画像と現在の観測画像を用いて、ロボットは自身の位置と目標位置を特定します。
その後、トポロジーマップ上のノードの列、すなわち初期位置から目標位置への経路を構成するノード列を選択します。
観測した画像を選択したノード列と比較することで、ロボットは対応する一連の行動を導き出します。
このようにして、ロボットは目標位置に到達することができます。
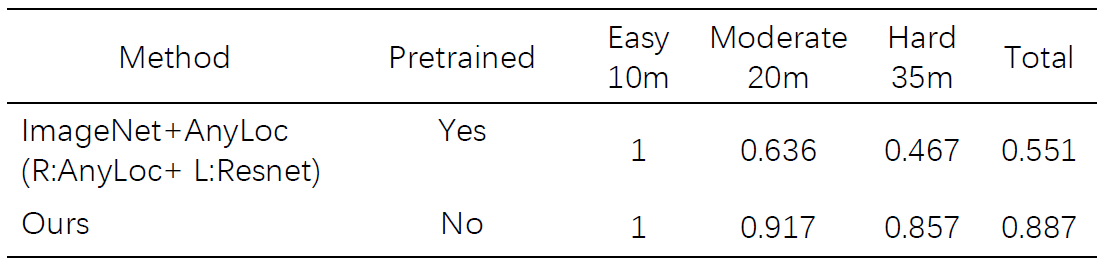
最後に、シミュレーション環境において、以前のベースラインとの成功率の比較を行いました。
さまざまな難易度のルートで比較を行った結果、我々の手法は事前学習を行わない条件でも、各ルートにおいてResNetを用いた方法より優れた性能を示しました。
これにより、未知の環境での迅速なトポロジーマップ構築とナビゲーションを実現するための解決策を提供することができました。
研究の担当者

M2
Wenzheng Zhang