TOP

無線給電ロボットを用いた追走給電
近年、電力を無線で伝送することができる無線給電技術の発展により、有線での接続制限の解消に期待が寄せられています。
しかし、無線給電は給電対象と給電側で適切な距離が保てないと伝送効率が低下してしまい、
電力ロスが生じてしまいます。 その電力ロスを避けるには、伝送効率を最大に保ち続ける必要があります。
そのため、我々は自律移動ロボットと無線給電技術を組み合わせた無線給電ロボットを提案し、
移動している物体に対して追従しながら無線給電を実行する、追走給電機能の実現を目指しています。
これにより、無線給電の電力ロスを解消するように給電側が追走するため、場所や接続の制限を解消した給電機能を実現します。
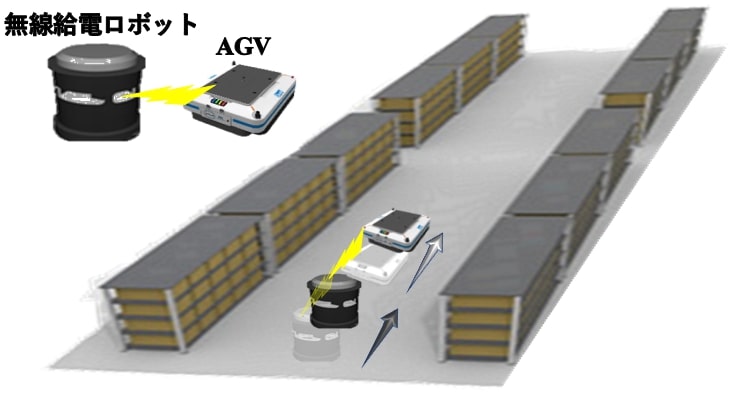
追走給電を、工場で活用されている無人搬送車(AGV:Automated Guided Vehicle)へ応用することにより、AGVの移動を制限することなく高効率な給電が可能になります。
また、バッテリの消費を防ぐことができるので、AGVが半永久的に可動することが可能になり、作業者の負担削減やコストの削減につながり、生産性が向上します。
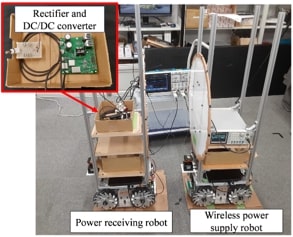
そこで、現在は無線給電ロボットと給電対象の相対位置を一定に保つように制御する追走機能の制御と、追走時のコイル間距離が変動する場合でも高効率で給電できる無線給電系の設計を行っています。
また、追走機能と無線給電機能を統合し、追走給電機能の性能の評価を行っています。
研究の担当者

M2
清水敬貴

M1
工藤大輝

B4
高寺智貴

B4
高井康成