TOP

センサフュージョンによるSLAM機能の向上
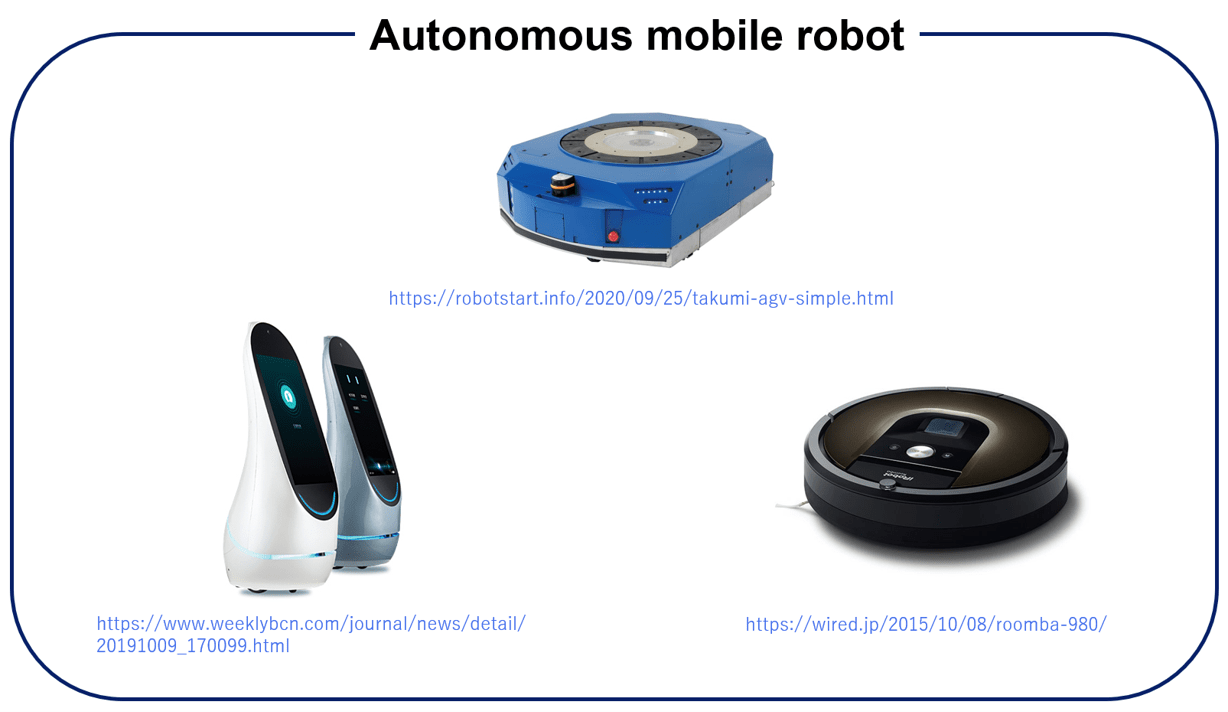
近年、自律移動ロボットは、工場で活躍する搬送ロボット、施設で活躍するサービスロボットなど、多岐にわたる環境・用途で利用されています。
これらは社会的問題とされる少子高齢化に伴う労働力不足の解消や、作業の自動化による省力化・効率化に貢献しています。昨今では新型コロナウイルスの影響により、
人の代替となる自律移動ロボットは需要がさらに高まり、導入コストの削減や移動の正確性がより求められると予想されます。実用化を考えた場合、
自律移動を安全かつ正確に行うために高精度なSLAM(Simultaneous Localization and
Mapping)が求められ、同時に、SLAMに用いるセンサは低コストであることが望まれます。
そこで我々はSLAMに用いる代表的なセンサとしてレーザ測域センサ(LiDAR:Light Detection and
Range)があり、我々はコストを抑えるために低コストLiDARの導入を検討しています。
しかし、低コストLiDARはレーザの到達距離が短く、計測範囲が狭くなるため、開けた場所などではSLAMの精度が低下し、ロボットの誘導が充分に行われません。
そこで、低コストで高精度なSLAMを実現するために、単眼カメラを用いた単眼SLAMによる補完を考えています。ロボットは短距離LiDAR SLAMを基盤として稼働させ、
LiDARが苦手とする場所では単眼SLAMによる自己位置推定で補完することで、短距離LiDAR SLAMの精度維持を目指しています。
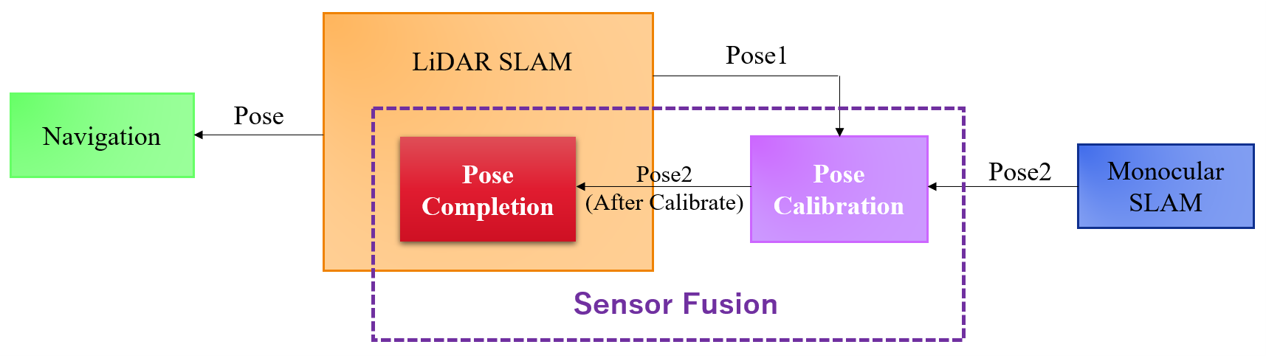
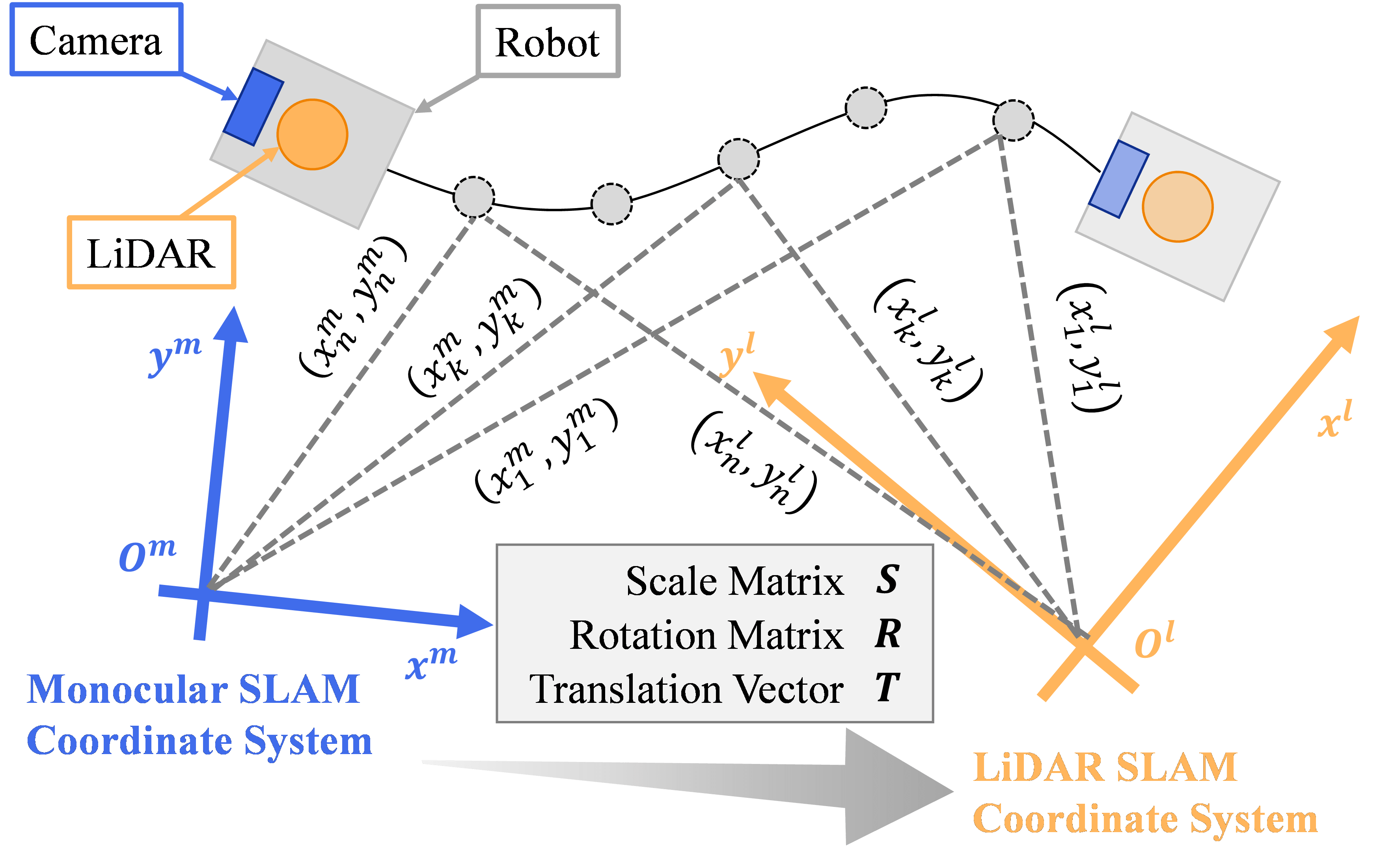
LiDAR SLAMを単眼SLAMで補完するために、それぞれのSLAMの座標系を一致させる必要があり、ここでは単眼SLAMを扱うため、座標系の拡大縮小まで考慮した較正が求められます。
そこで本研究では、各座標系間の変換パラメータを自動で推定するために、図に示すように同一のロボットに対するそれぞれの座標系での自己位置推定結果を用います。
座標変換パラメータの自動推定とそれによるリアルタイムな座標系の較正機能を実装することで、単眼SLAMの座標系をLiDAR SLAMの座標系に較正を行います。
以上の較正機能により、自己位置の補完を行う機能の基礎開発を行いました。
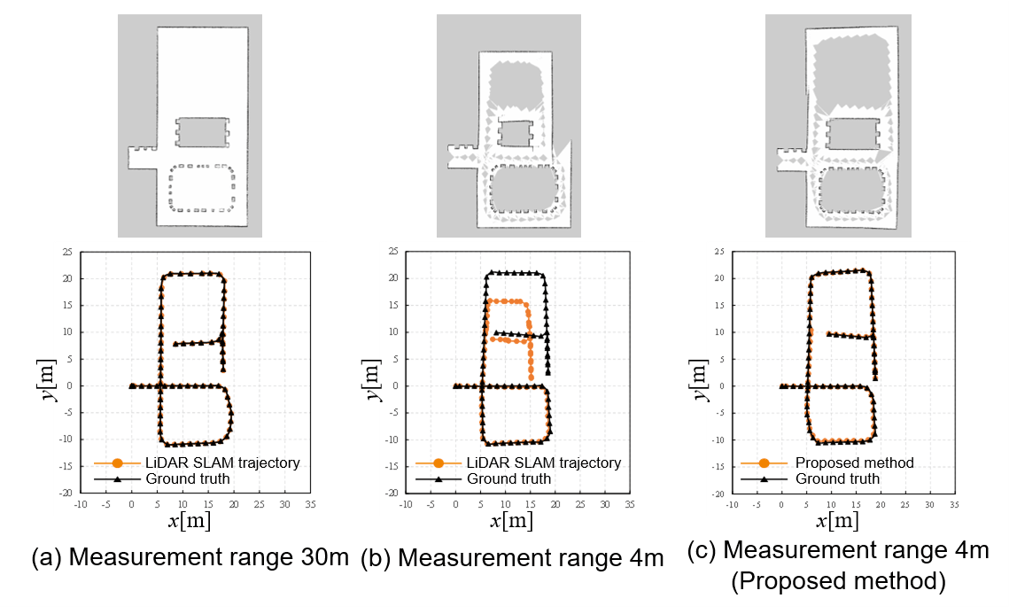
我々は生成された地図の評価および自己位置推定結果の評価を行うために、シミュレータのGazeboを用いて実験を行いました。
図のうち左が長距離LiDAR、中央が短距離LiDAR、右が我々の提案手法により出力された地図、および自己位置と真値を比較したグラフです。
左の長距離LiDARは地図、自己位置共に正確なデータが出力できていることがわかります。
中央の短距離LiDARは環境上部で自己位置に退化が起きることで、地図には歪みが生じ、自己位置は縮んだ状態で出力されていることがわかります。
そこで右の提案手法では短距離LiDARで歪みが生じていた環境上部でも歪みを起こすことなくデータが取得できていることがわかります。
このことから短距離LiDARとカメラを用いることで短距離LiDAR SLAMの精度維持、および低コスト化が実現できていることが確認できました。